- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
一种新的OFDM帧同步检测法
录入:edatop.com 点击:
摘要 文章在研究T.Schmidl & D.Cox算法和H.Minn算法的基础上,提出一种OFDM系统的帧同步检测方法,利用特殊训练符号的互相关信息来完成帧同步检测,提高了帧同步的精度。计算机仿真表明,文中提出的算法具有更强的适应性和抗多径能力。
一、引言
OFDM是一种多载波调制方式,它的基本思想是通过允许子信道频谱重叠,但又相互不影响的频分复用(FDM)的方法来并行传送数据,有很高的频谱利用率,具备较强的抗脉冲噪声及抗多径衰落的能力。但是,实现OFDM系统存在技术上的难点,其中很重要的一条是系统对同步的要求很高,因为它对定时误差和频率误差要比单载波技术敏感得多。OFDM帧同步检测问题关系到数据传输的正确性和可靠性,目前有许多文献都提出了不同的帧同步检测方法[1][2]。
T.Schmidl & D.Cox[3]算法和H.Minn[4]算法都是利用特殊的训练符号,进行相关,寻求帧同步的检测方法。本文主要是对他们的算法进行改进,因此,首先对这两种典型的OFDM突发系统定时同步算法进行讨论,分析其不足之处,最后给出一种改进的基于训练符号的定时同步算法。
二、系统描述
图1是OFDM系统模型。串行发送的数据流{SK}首先经过串并变换变成并行的数据流,经过逆傅立叶变换、并/串变换后得到数据流{SN},加上循环前级后得到{Xn},然后进行数模变换、射频调制后发射出去。接收端的处理过程与发送端的过程相反。图中发送端各点的信号可表示为:
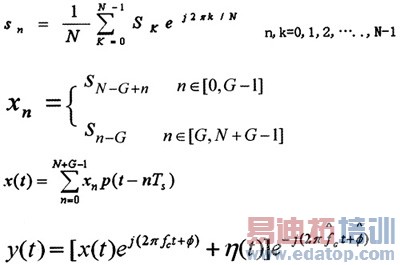
采样后得到的数据流{rn}为:

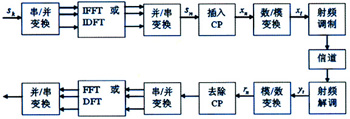
图1 OFDM系统原理
三、改进算法
3.1 T.Schmidl & D.Cox算法和H.Minn算法描述的不足
T.Schmidl & D.Cox提出的算法的一个主要问题是,定时测度函数在正确定时点附近有一个平台,被称为定时测度平台,这个平台导致帧起始的模糊,增大了估计器的方差,参见图3。针对Schemidl和Cox提出方法中出现定时测度平台的不确定性,H.Minn等提出了一种改进的定时算法,这个方法的最大优点是在定时时刻,定时测度表现为一个单点的峰值。尽管H.Minn算法的定时测度中,在正确时刻能产生一个尖锐的峰值,但是在错误时刻也很容易出现较大的多个尖峰,对判决门限的选取带来困难,尤其子载波数目小的突发系统中,往往错误时刻的峰值还超过正确时刻的峰值,导致估计错误,参见图4。
3.2 本文改进算法
改进算法仍然采用H.Minn算法的帧结构(如图2所示),在每个传输帧里,第一个符号为用于定时同步的训练符号,该符号又由四个参考符号组成,第一个参考符号由PN序列调制后形成的N/4个数据经IFFT处理后得到,用A表示,其余的第二、三、四参考符号为第一个参考符号的重复或者重复求负值,分别表示为A-A-A。在此帧结构中,由于前一部分(AA)与后一部分(-A-A)只相差一个负号,因此可以认为此帧结构与T.Schmidl & D.cox算法中的帧结构相类似(只差一个负号)。因此结合T.Schmidl & D.Cox算法和H.Minn算法,利用H.Minn算法削弱T.Schmidl & D.Cox算法中的多个峰值的现象,而利用T.Schmidl & D.Cox算法克服H.Minn算法中的测度平台现象。算法描述如下:

图2 H.Minn算法的帧结构
令在第一个训练符号除循环前缀以外,部分复数样值成对样值乘积和为:
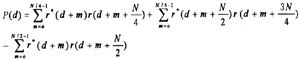
这里d是对应于N样值的窗口中的第一个样值的一个时间指示数,当接收机搜索第一个训练符号时,这个窗沿时间轴滑动,接收到的训练符号的能量定义为:
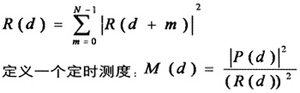
定时测度最大值对应的时刻就是参考符号的第一个样点时刻,即di=arg{MAX[M(d)]}
四、仿真性能分析
本文改进的定时算法与Schmid & Cox算法和H.Minn算法的不同之处在于定时测度的差异,定时测度决定了定时方法的性能,本文算法相对前两种算法,进行相关的数据增多,因此性能会得到改善。对于相同系统参数条件下,给出三种算法的测度进行直观和粗略的仿真比较,结果如图所示:图3为AWANG信道下三种算法的测度比较。仿真参数为:FFT为64点,循环前缀长度为16,映射方式为16-QAM,噪声为加性高斯噪声。
计算机仿真结果显示,高斯信道中,对于Schmid & Cox算法的定时测度产生的平台,幅度会产生波动,尤其当信噪比比较低子载波总数比较小时,这种现象更为严重。H.Minn算法只能用于子载波数目较大的情况,而且在非正确定时时刻出现的峰值与正确时刻出现的峰值之间的差异比较小,当系统的子载波数目较小时,如子载波总数为64循环前缀为16时,非正确的定时时刻对应的测度峰值,甚至高于正确时刻对应的峰值,造成估计错误,导致定时同步的失败。因此H.Minn算法不能用于子载波数目比较小的突发OFDM传输系统。而本文改进算法,克服了上述两种算法的不足,在较小载波数目和较低SNR下,均有尖锐的峰值出现,因此具有更强的适应性。
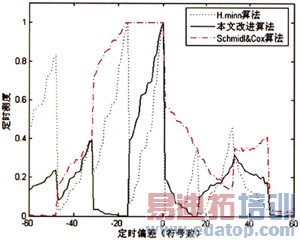
图3 AWANG信道下三种算法的测度
图4为多径信道条件下三种算法的测度比较。仿真参数为:FFT为64点,循环前缀长度为16,三条路径参数为ɑ0=0.1260,0=0;ɑl=0.3780,1=3;ɑ2=0.8819,2=19;最强路径的时延为19个样点,因此,从图上可以看到,正确的定时时刻应该是19,测度峰值出现在第19个样点处。从图上可以看到:采用改进算法,即使是在多径时延超过循环前缀长度的情况下,在正确时刻19个样点处,仍产生了一个尖锐峰值,而Schmid & Cox算法和H.Minn算法在多径信道中较差。因此本文改进的定时算法具有更强的抗多径能力。

图4 多径信道条件下三种算法的测度
参考文献
[1] Sridhar Nandula,K Giridhar.Robust Timing Synchronization for OFDM Based Wireless LAN System [R]. TENCON-2003,14-Oct-2003
[2] Hlaing Minn,Vijay,Khaled Ben Letaief .A Robust Timing and Frequency Synchronization for OFDM Systems[J].IEEE Transactions on. Wireless Communications,July 2003,2(4):822-838
[3] Schmidl,T.M.;COX,D.C“Robust frequency and timing synchronization for OFDM” Communications,IEEE Transactions on,Volume:45 Issue:12,Dec.1997 Page(s):1613-1621
[4] Minn,H.;Zeng,M.;Bhargava,V.K.“On timing offset estimation for OFDM systems”IEEE Communications Letters, Volume:4 Issue:7,Page(s):242-244 July 2000
作者:郭勇 张海林 刘耀宇 来源:信息通信
上一篇:基于E-Model的VoIP语音质量测量
下一篇:承载多重宽带业务的POP点建设

