- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
分布式Zigbee多节点传感器数据融合轨迹关联
录入:edatop.com 点击:
摘要:数据处理的速度不但取决于计算机本身,而且在一定程度上取决于的算法复杂程度,算法运算量的大小直接影响到设备运行的质量。文中通过对分布式Zigbee多节点传感器数据融合中的轨迹关联问题进行探讨,对节点状态估算进行推导,形成节点状态估算算法,提供了简单、方便、实用的轨迹关联算法。
分布式Zigbee多节点传感器结构,以用较低的费用获得较高的可靠性和实用性,可以减少数据总线的频宽和数据处理的要求;当一个传感器的性能降低时,其观察结果对整个传感器的信息融合性能和结果的影响较小;同时,可以逐步增加数据采集节点的数量,使系统的结构适应控制中心的操作要求,并有与集中式结构相同或类似的精度。设计新的多传感器数据交换系统时,分布式结构已成为优先选择的方案。分布式结构在交通管制、监视系统和多平台数据融合系统有着广泛的应用前景。在分布式多传感器坏境中,每个传感器都有自己的信息处理系统,并且各系统中都收集了大量的目标信息。那么,一个重要的问题是Zigbee路由节点,如何判断来自不同节点的两个信息是否表示同一个目标信息,也就是轨迹关联问题;解决了轨迹关联问题,实际上也就解决了Zigbee多节点传感器覆盖区域中的重复跟踪问题。
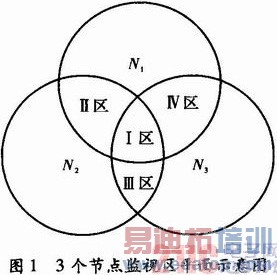
对于Zigbee节点N>2的多节点情况,所有节点不仅存在着共同的公共监视区,而且各节点间也可能存在局部公共监视区,如图1给出了Zi-gbee节点N=3情况下的公共监视区平面示意图。其中,I区为3个节点的公共监视区;Ⅱ区为节点N1和N2间的公共区;Ⅲ区为节点N2和N3间的公共区;Ⅳ区为节点N3和N1间的公共区。从示意图中不难看出,可以通过N1分别和N2、N3进行数据关联校验,然后再进行N2和N3数据关联校验,这样I区的轨迹多关联了二次;由于关联在数学上是等价关系,即对I区的轨迹而言,N1与N2关联校验一次之后,再对N2和N3进行一次关联校验即可。因此,N1与N3关联校验时可不考虑I区的轨迹,而只考虑他们之间的监视公共区(Ⅳ区)轨迹;对I区各节点公共区的轨迹也可以单独处理,有两种方法:一种是N1和N2关联,然后N3和N2关联,再运用等价关系的可传递性形成N个节点的共同关联轨迹。另一种方法是将其化成多节点分配问题,共同监视区轨迹处理完后,再分别处理两个节点间的重叠区的轨迹。这两种方法的优点是直观、简单、容易理解、工程上容易实现,当节点N较少时处理速度较快;但当节点N较多时处理速度成倒指数规律衰减,同时,这种处理方式缺乏严格的数学描述。所以,为提高分析轨迹关联的科学性、严密性,下面采用多节点分配方法探讨Zigbee多节点传感器数据融合中的轨迹关联问题。
1 多节点关联问题的求解
对于多节点关联问题的求解,其复杂程度随着节点数量的增大成指数规律增长。基于测量的多节点分配方法可以形成一套完整的算法。下面先讨论传感器测量的划分。
考虑有3个Zigbee节点传感器形成的观察量 是来自j1、j2和j3Zigbee节点传感器测量的集合;针对划分测量,假定测量
是来自j1、j2和j3Zigbee节点传感器测量的集合;针对划分测量,假定测量 ,n=1,2,3的引入可以是在测量单个和两个节点传感器的检测目标交互中,把观测量看作是由3个传感器形成的观测量。若传感器j1在位置丢失目标,而传感器j2和j3的测量源于目标t,则这一情况的似然函数可表示为
,n=1,2,3的引入可以是在测量单个和两个节点传感器的检测目标交互中,把观测量看作是由3个传感器形成的观测量。若传感器j1在位置丢失目标,而传感器j2和j3的测量源于目标t,则这一情况的似然函数可表示为

式中,Z0j2j3是3个传感器对位于目标真实位置向量 处的同一目标的测量集合;PDs是传感器s的检测概率;
处的同一目标的测量集合;PDs是传感器s的检测概率; 表示传感器s的第js测量值。这一事件的似然函数为
表示传感器s的第js测量值。这一事件的似然函数为

式中,u(js)为二值示性函数,当js=0时,u(js)=0;否则,u(js)=1。
这样一来,一个可能的划分是把集合Z划分成两个与目标互联的测量子集Zt和没有与其他目标互联的虚拟测量子集Zf,表示为γ={Zt,Zf},其中,Zt={Zj1j2j3},ji=1,2,3,…,ni,i=1,2,3;Zf={Ziji},ji=1,2,3,…,ni,i=1,2,3;γ={Zt,Zf}表示集合Z划分成子集Zt,Zf的可能,把集合分成测量子集和虚拟测量子集;在静态传感器测量数据互联中,对一个位置进行全面测量估计至少需要两个传感器;否则就是认为虚拟测量子集。因此,测量集合Z的最佳关联划分是把Z划分为来源于目标的测量子集Zt和虚警子集Zf,这时只需求解γ与γ0的最大联合似然函数比,即
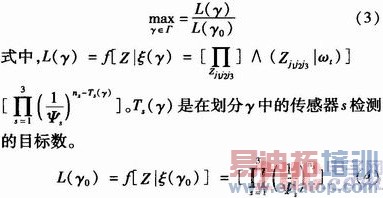
真实目标位置ωt近似于极大化广义似然比的极大似然估算值 ,所以式(4)中的ωt可用代替
,所以式(4)中的ωt可用代替 ,该估算值可从3个传感器测量获得,即
,该估算值可从3个传感器测量获得,即

2 近似测量
近似测量算法采用节点状态估算推导形成,节点状态估算算法为

式中, 为局部节点s用于更新第i个局部轨迹的近似测量;Ksis(k)是局部节点s的第is个局部轨迹的滤波增益。根据式(6)求解
为局部节点s用于更新第i个局部轨迹的近似测量;Ksis(k)是局部节点s的第is个局部轨迹的滤波增益。根据式(6)求解 有
有

式中, (k)是Ksij(k)的逆阵或伪逆阵。局部节点仅向融合中心传送状态估计值,不传送近似测量值,通过式(7)可以在融合中心获得局部Zigbee节点的近似测量值。近似测量构造要求信息融合中心已知轨迹状态值
(k)是Ksij(k)的逆阵或伪逆阵。局部节点仅向融合中心传送状态估计值,不传送近似测量值,通过式(7)可以在融合中心获得局部Zigbee节点的近似测量值。近似测量构造要求信息融合中心已知轨迹状态值 (k|k-1)、状态估计值
(k|k-1)、状态估计值 (k|k)。增益矩阵Ksij(k)和测量矩阵Hs(k)之所以可作为近似测量,是因为构造的结果可能不是实际测量值,这取决于局部节点使用的数据关联算法。当局部节点使用最近邻域互联算法时,所构成的测量值是局部近似算法中使用的实际测量值;但当局部节点使用联合概率数据为互联算法(JPDA)或混合归并(MR)算法时,重新构成的算法结果不产生实际测量值;因而原测量值需要加权平均。N≥3时多节点分配方法适用于各节点公共监视区的轨迹关联校验。对各局部节点间的局部公共区则要利用N=2时的各种轨迹关联算法或使用二维分配模型求解。
(k|k)。增益矩阵Ksij(k)和测量矩阵Hs(k)之所以可作为近似测量,是因为构造的结果可能不是实际测量值,这取决于局部节点使用的数据关联算法。当局部节点使用最近邻域互联算法时,所构成的测量值是局部近似算法中使用的实际测量值;但当局部节点使用联合概率数据为互联算法(JPDA)或混合归并(MR)算法时,重新构成的算法结果不产生实际测量值;因而原测量值需要加权平均。N≥3时多节点分配方法适用于各节点公共监视区的轨迹关联校验。对各局部节点间的局部公共区则要利用N=2时的各种轨迹关联算法或使用二维分配模型求解。
3 结束语
在多数目标跟踪的应用中,获得大量精确的传感器数据较困难。例如:Zigbee无线车辆门禁控制系统中,只能每几秒钟测量一次小区门前内外机动车的位置,当获取的信息不足时,所采用的模型的精度就显得尤为重要。原因有二:第一如果控制系统对目标状态的采集频率高于Zigbee传感器的频率,那么就要用到跟踪器对位置的预测值,不同的模型对这个预测值的质量影响很大;第二是为了优化Zigbee传感器的性能,必须最大限度地利用来自传感器的有限数据,在多数近似测量算法中,只能通过开发一些精度的实用模型来实现。上述节点状态估算算法有效地改善了Zigbee传感器的性能,提高了跟踪精度。
作者:李金明 兰州石化职业技术学院 来源:电子技术

