- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于MSP430和nRF905的塔吊无线遥控系统
录入:edatop.com 点击:
0 前 言
无线遥测产品的市场发展迅速,无线遥测技术已经成为决定产品竞争力的一个重要因素。从发展的眼光来看,塔吊产品的无线化是大势所趋,目前国内建筑工程等行业使用的塔吊多属控制室控制形式。控制室束缚、视线不清、环境恶劣或指挥配合不当等因素皆可形成事故隐患。国外同类产品价格太高,多为通用型产品,而我国大量的建筑施工中小型企业所使用的塔吊型号多,很难根据用户提出的相关技术资料(机械电气原理图,工作机构原理图等)进行遥控改造,继而结合实际需求,选定最佳的控制方案,亦即不适应我国的市场需求特点。
在现有塔吊控制室控制的基础上,结合微型计算机控制技术,本研究提出一种低功耗、自动CRC校验码、软件编码和硬件译码、接收器采用无记忆控制且具有高抗干扰能力和高可靠性的塔吊无线遥控系统,既保证了安全操作又大幅度提高了生产效率。
1 系统结构和功能概述
新型塔吊无线遥控系统包括发射器和接收器两个部分,遥控系统结构,如图1所示。发射器由键盘输入电路、单片机、无线发射电路和天线等构成;接收器由接收天线、无线接收电路、单片机、三2八译码器、反相器、与非门、光电耦合器、继电器等构成。其特点是系统的核心采用超低功耗的MSP430系列单片机,进而采用三2八译码器、反向器、与非门、光电耦合器以提高抗干扰能力和系统的可靠性。
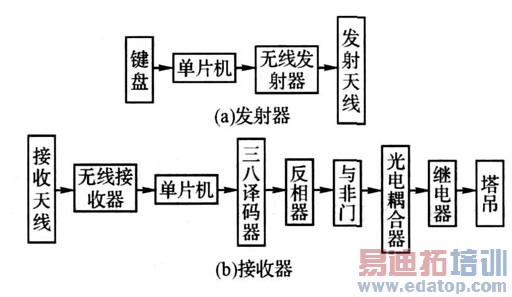
图1 系统结构
2 系统硬件电路设计
2. 1 发射电路
信号发射电路包括键盘、CPU 和数据发射部分,硬件原理,如图2 所示。塔吊的控制量(上、下,左、右、前、后、低速、中速、高速、急停等)通过键盘输入电路将相应控制信号送入单片机MSP430F135 的I/O口,经过单片机处理的信号通过其SP I口输出到无线芯片nRF905,单片机协调整个系统的正常工作,同时对射频芯片进行设置以确定其工作模式、工作频率、传输速率等参数,输出信号经过无线芯片的处理,送入无线发射部分发送至接收方。
MSP430单片机是TI公司生产的一种超低功耗的混合信号控制器。这些微控制器可用电池工作,而且可以有很长的使用时间,器件在少于6μs的时间内可以从低功耗模式迅速唤醒。MSP430单片机内还集成了A /D转换器、硬件乘法器、定时器、比较器等模块。
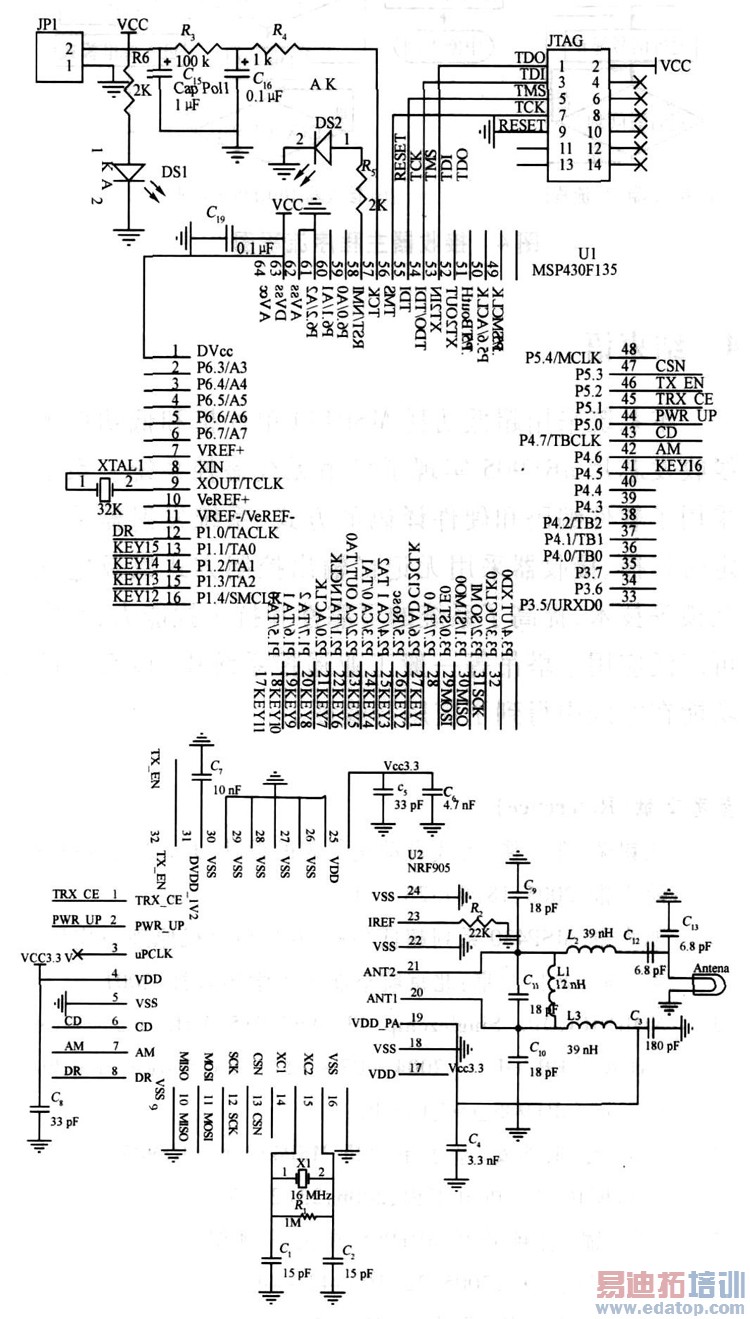
图2 发射器硬件原理图
发射部分采用nRF905 芯片。nRF905 是挪威Nordic公司推出的单片射频收/发器。工作电压为1. 9~3. 6 V, 32引脚QFN封装( 5 mm ×5 mm) ,工作于433 /868 /915 MHz 3个ISM频道。nRF905由频率合成器、接收解调器、功率放大器、晶体振荡器和调制器组成,不需外加声表滤波器, ShockBurstTM 工作模式,自动处理字头CRC (循环冗余码校验) ,使用SP I接口与微控制器通信,配置非常方便。此外,其功耗非常低。以10 dBm的输出功率发射时电流只有11 mA,工作于接收模式时的电流为12. 5 mA,内建空闲模式与关机模式,易于实现节能。nRF905提供了强大的跳频机制以及大量的频道支持,可以应用于许多特殊的场合。
2. 2 接收电路
接收电路与发送电路基本相同,只是无线芯片工作在接收模式。塔吊系统的可靠性要求高,为防止干扰引起接收电路误动作,接收驱动输出采用软件编码、硬件译码技术,即每个继电器的动作对应一个数字编码,该编码经译码器译码输出,输出信号经光耦隔离和反相器驱动输出控制继电器的动作。这样其他信号的输出将被禁止,也消除了系统由于上电(或断电)短暂时刻I/O口输出不确定而引起的误动作。
3 系统软件设计
系统软件包括发射器和接收器软件。发射器和接收器软件的功能划分对遥控系统性能的影响很大,为提高系统可靠性,加快紧急故障出现时的恢复速度,所有控制的逻辑处理全部在发射器中实现,发射器的发送采用定时发送和中断发送两种方式:当有按钮动作时,用中断方式发送,在随后的时间内按定时方式发送。接收器仅实现信号接收、译码和驱动输出,当连续3次收不到信息时,接收器自动关闭所有输出,恢复初始状态。这样做的优点是:
(1) 对发送器的按钮控制的捕捉可靠。当中断信号万一丢失时,接收器失去控制而保持原来状态,但随后的定时发送的控制信息会作出相应的控制。
(2) 当射频信号受到干扰或发射器出现故障而使接收器收不到控制信息时,接收器自动关闭所有输出而恢复初始状态,防止事故的扩大,同时可实现"发射器关闭或电能不足时,接收器自动关机".
3. 1 发射器软件
发射器刚上电时,完成的初始化主要包括: I/O端口初始化、无线芯片配置、打开定时器和I/O 中断使能。其余的功能主要在定时中断和I/O中断服务子程序中实现。中断服务子程序的主要功能为:判断各按钮的状态、按钮状态编码、编码状态发送。MSP430微控制器和nRF905通过SP I口通讯的处理流程如下:
(1) 微控制器有数据要发送时通过SP I接口,按时序把接收机的地址和要发送的数据送传给nRF905;
(2) 微控制器置高TRX _CE 和TX _ EN, 激发nRF905的ShockBurstTM发送模式;
(3) nRF905 按ShockBurstTM 发送: ①射频寄存器自动开启; ②数据打包(加字头和CRC校验码) ;③发送数据包; ④当数据发送完成时,数据准备好引脚被置高。
(4) AUTO_RETRAN被置高, nRF905不断重发,直到TRX_CE被置低;
(5) 当TRX_CE被置低, nRF905发送过程完成,自动进入待机模式。
发射器流程图,如图3所示。
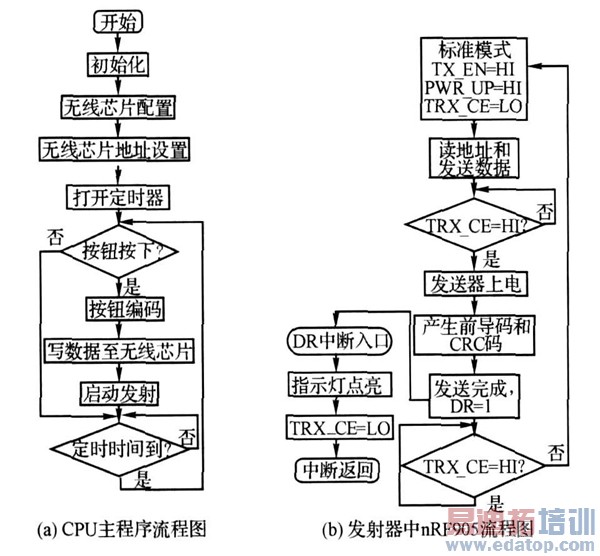
图3 发射器主程序流程图
3. 2 接收端软件
接收器上电初始化主要包括: I/O端口初始化、无线芯片配置、打开定时器和I/O中断使能、继电器输出使能。其余的功能主要在I/O 中断服务子程序中实现。nRF905进入接收模式后,不断监听接收信号。当收到载波信号时,发出CD中断信号;当接收地址正确时,发出AM中断信号;当接收数据正确时, nRF905自动移去字头、地址和CRC校验位,然后把数据准备好引脚置高,发出DR中断信号。微控制器中断服务子程序通过SP I口读取所实现的主要功能为:判断各按钮的状态、按钮状态编码、编码状态发送。MSP430微控制器通过SP I口读取nRF905内的数据,接收端主程序流程图,如图4所示。
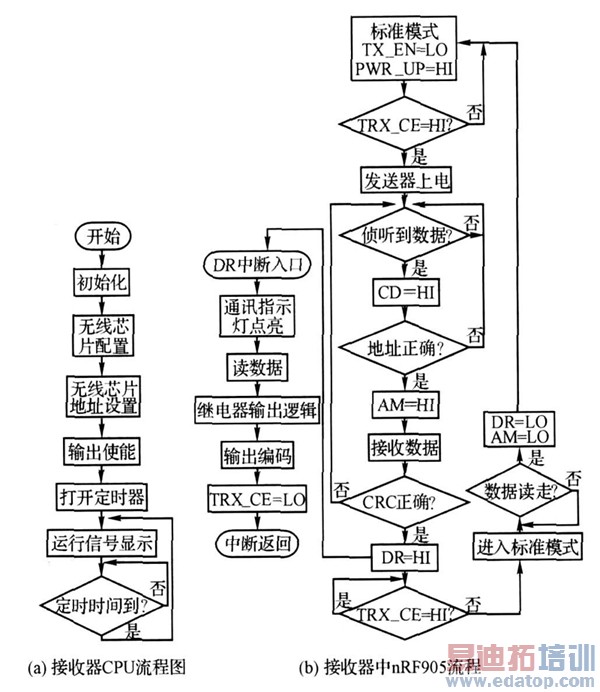
图4 接收器主程序流程图
4 结束语
本系统采用超低功耗MSP430单片机和低功耗无线收发芯片nRF905实现了塔吊无线遥控系统。系统采用了软件编码和硬件译码的方式、系统发射器采用定时扫描、接收器采用无记忆输出控制方式以及电气互锁等技术,提高了系统的可靠性和抗干扰能力,系统可广泛应用于塔吊等一般工业遥控系统中,该系统的功能在实践中得到了应用与验证。
作者:杨鹏 来源:《机电工程》
我推荐大家读
轻松参与
VS
表达立场
这是垃圾文章
上一篇:轻松编程实现无线遥控
下一篇:无线传感器网络热点的研究

