- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于RSSI的无线传感器网络距离修正定位算法
录入:edatop.com 点击:
0 引言
对于大多数无线传感器网络应用来说,没有位置信息的数据是毫无意义的。无线传感器网络目标定位跟踪的前提是节点自身定位。无线传感器网络节点定位算法可分为基于距离和距离无关两大类,基于距离的定位算法主要有RSSI、TOA、TDOA、AOA 等,距离无关的定位算法主要有质心算法、DV-hop 算法、凸规划、MDS-MAP 等。
RSSI 测距无需额外硬件,实现简单,具备低功耗、低成本等特点,应用十分广泛。RSSI 的技术原理是已知锚节点发射信号的强度,根据未知节点接收到的信号强度,利用信号传播模型计算两点的距离。由于存在多径、干扰、遮挡等因素,RSSI 测距的精度较低,必须采用各种算法来减小测距误差对定位精度的影响,因而提出了一种基于RSSI 测距的无线传感器网络距离修正定位算法,可有效减小RSSI 测距误差对节点定位精度的影响。
1 算法模型
1.1 无线信号传播模型
RSSI 测距使用的无线信号传播模型包括经验模型和理论模型,理论模型是在大量经验模型数据的基础上总结提炼而成的。
对于经验模型,首先要按照一定的密度选取参考点,建立信号强度与到某个信标点距离的映射矩阵,在实际定位时根据测得的信号强度与映射矩阵进行对比,并采用数学拟合方式确定待测节点到锚节点的距离。
无线信号传播理论模型主要有自由空间传播模型、对数距离路径损耗模型、对数-常态分布模型等,其中对数-常态分布模型的使用最为广泛。
对数-常态分布模型如式(1)所示:

其中n 是路径损耗指数,表明路径损耗随距离增长的速率,范围在2~6 之间。d0 为近地参考距离,由测试决定。式(1)能够预测出当距离为d 时接收到的平均能量。由于相同距离d 的情况下,不同位置的周围环境差距非常大因而引入了Xσ,Xσ 是一个平均值为0 的高斯分布变量。
为了更好地描述距离修正定位算法,这里提出两个合理的假设条件:
①由于各种障碍物的影响,绝大多数实际情况中,式(1)预测出的PL(d)[dB]比实际信号能量偏大;②当距离d 增大时,PL(d)[dB]与实际损耗能量的相对偏差也会增大。
1.2 确定相交区域质心的数学模型
已知三个节点A、B、C 的坐标为(xa, ya)、(xb, yb)和(xc,yc),节点O到他们的距离为ra、rb 和rc,假设节点O的坐标(xo, yo),则(xo, yo)的数值可通过式(2)得出,也就是说以A、B 和C 三点为圆心,以ra、rb 和rc 为半径作圆,则三圆将相交与点O,如图1(a)所示。
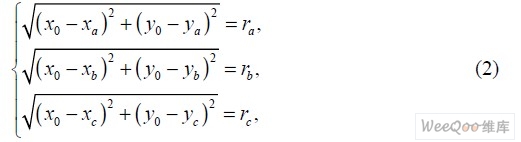
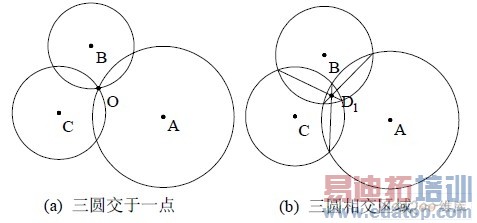
图1 三圆相交情况。
但在实际情况中,由于RSSI 测距存在误差,并且由于实际的路径损耗比理论模型的数值偏大,也就是说测量出来的未知点到锚节点的距离d 总是大于实际距离r。以A、B和C 三点为圆心,以da1、db1 和dc1 为半径作圆,三圆将不再相交于点O,而是存在一个相交区域,如图1(b)所示。
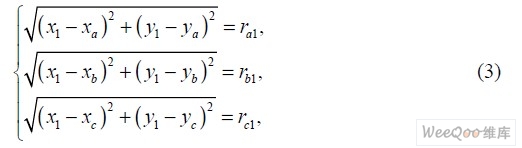
三圆相交区域的边界有三个交点,三点质心为点D。其中点D 的坐标可以通过式(3)求解。
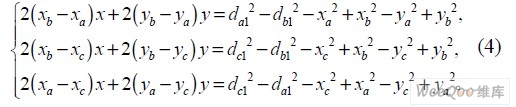
但是二次方程,求解过程计算量较大,因而文中采用如图1(b)所示的点D1 的坐标近似质心D 的坐标。三圆两两相交,则三条交线将相交于点D1。将式(2)中的方程式两两相减,则分别得到每条交线的直线方程,D1 的坐标则可以通过这些直线方程求解,如式(4)。
1.3 距离修正
在某些文章中,以D1 的坐标作为点O 的近似值,其准确度虽然比三边定位等方法要高,但是还是可能存在较大的误差,尤其是当da1、db1、dc1 与ra、rb 和rc 的相对误差各不相同时尤其明显,因而需要对RSSI 方法测出的距离da1、db1和dc1 进行修正,然后再重复地求出新的三线交点D2 的坐标,则可以用点D2 的坐标作为点O 的近似坐标。
设点A、B 和C 到D1 的距离la1、la2 和la3,则总体修正系数如式(5)所示。

根据1.1 节中假设②,距离越远测距相对误差越大,则其修正程度越大,则da1 的修正系统如式(6)所示,db1 和dc的修正系数类似。

修正后的距离da2 通过式(7)得出,db2 和dc2 类似。
2 算法流程
算法流程如下:
①各锚节点以相同功率周期性地向周围广播定位信息,信息中包括节点ID 和坐标。普通节点收到定位信息后,计算同一锚节点的RSSI 平均值;
②当普通节点收集到一定数量的锚节点信息时,不再接收新信息。各普通节点根据RSSI 从强到弱对锚节点排序,由式(1)求出节点到锚节点的距离;
③选取距离最近的3 个锚节点;
④通过式(4)计算三线交点D1 坐标;
⑤分别计算3 个锚节点与交点的距离;
⑥通过式(5)计算总体修正系数;
⑦通过式(6)分别计算各自的修正系数,然后通过式(7)计算修正后的距离;
⑧再次通过式(4)计算修正后的三线交点D2 的坐标,D2的坐标即为点O 的近似值。
3 仿真分析
用MATLAB 进行算法仿真,基本初始条件是无线传感器网络位于100 m×100 m 的区域内,该区域左下角为(0,0),右上角为(100,100)。区域内均匀部署4、9、16、25个锚节点,其中部署16 个锚节点的位置如表1 所示。
未知节点随机分布在区域内,路径损耗系数设为2.4,每次仿真实验进行500 次,仿真结果取500 次的平均值,各次仿真实验结果如表2 所示。
表1 16 个锚节点位置坐标
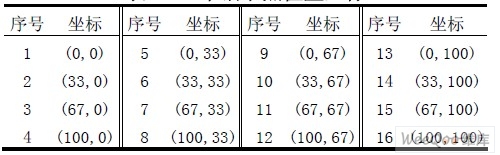
表2 仿真结果

从仿真结果可以看出,当锚节点数目较少时,增加锚节点数量可以显着提高定位精度。路径损耗系统对定位精度也有影响,路径损耗系统越大,定位精度越高。从表2 可以看出,距离修正次数增多对定位精度没有显着的影响,也就是说一般情况下只需要进行一次距离修正即可,采用距离修正与不采用距离修正相比,定位精度明显提高。
4 结语
无线传感器网络基于RSSI 测距的定位算法由于实现简单,应用十分广泛。但由于RSSI 测距的精度不高,降低了节点定位精度。基于RSSI 的无线传感器网络距离修正定位算法利用RSSI测距,通过确定相交区域近似质心,以此为参考点对距离进行修正,然后确定未知节点位置。仿真结果表明,该算法对测距误差具有较高的容忍程度,并且具备很高的定位精度。如图2 所示,三圆相交还存在无3 个交点的情况,下一步工作将详细研究图2所示各种情况对该算法的影响,从而对算法进行改进完善。
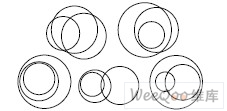
图2 三圆相交区域无3 个交点的情况
作者:陈昌祥 达维 周洁 来源:《通信技术》
我推荐大家读
轻松参与
VS
表达立场
这是垃圾文章
上一篇:SingleSON开启运维自动化时代
下一篇:基于物联网的城市停车位管理系统

