- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于增量式PID控制的数控恒流源
录入:edatop.com 点击:
摘要:数控恒流源在计量、半导体、传感器等领域得到广泛应用,针对目前市场上大部分恒流源产品精度和智能化水平偏低等问题,提出了一种增量式PID控制的数控恒流源设计方法。该系统通过单片机对恒流源模块的输出进行采样,采用增量式P1D控制算法进行数值处理。并通过Matlab仿真与传统PID控制算法进行对比。实验结果表明其具有分辨率高、纹波小、高精度的特性。
0 引言
随着半导体集成技术的发展,恒流源的研究已经入崭新的一个阶段。在一些电真空器件中,如示波器,功率发射管等由于通电瞬间的电流非常大,所以对稳定其工作来说,恒流源显得非常必要。另外如各种标准灯、校验表、自动化仪表和半导体器件参数测量等,恒流源对器件的性能起着重要作用。
恒流源的实质是对电流进行反馈,通过对硬件电路进行供电,从而使电流趋于恒定。在得到电流之后形成反馈,从而建立恒流源。由于恒流源具有的特性,所以具有适合阻性、感性、容性负载的优点。理想的恒流源不会因负载的输出电压、环境温度的变化而变化,并因其内阻无限大,所以可使其电流全部输出。
1 恒流源实现原理
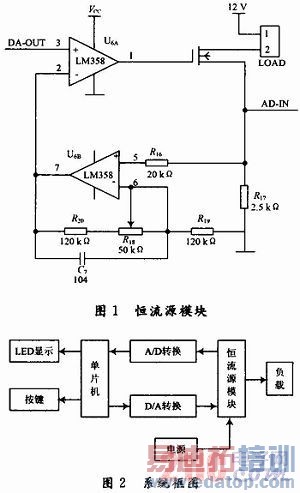
数/模转换输出的值加到运放的LM358正输入端,输出端电位加到场效应管的栅极上,根据场效应管的特性,可使输出电流信号放大若干倍,具体数值根据所选场效应管与外部电路而定。通过分析计算出外部电路的参数,使场效应管工作在放大区,由于此时漏源极电流仅决定于栅源极电压,所以当改变栅源极电压时,源极的电流也随着变化。为排除外部干扰信号的影响,源极电位加往U6-B运放器的正输入端以便滤波。经滤波所产生的信号加入到U6-A的负输入端,使其经过两端的压差放大之后控制场效应管的栅源极电压。当场效应管的漏极电流变大时,源极的电流同样增大,U6-A的反相端电位也变大,这样U6-A两端输入之差变小,所以场效应管的栅极电位也变小,漏极电流随之变小,从而达到恒流的效果。当场效应管的漏极电流变小时,源极的电流变小,U6-A的反相端电位变小,这样U6-A两端输入之差变大,所以场效应管的栅极上的电位变大,从而也达到恒流的效果。恒流源模块如图1所示。
2 系统的方案设计
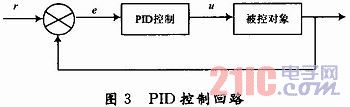
本文设计的恒流源主要分下面几个模块:单片机控制系统、A/D和D/A转换模块、电源模块、恒流源模块、负载及显示模块。通过对按键的操作实现手动输入,通过D/A转换输入至恒流源模块,再通过A/D转换将数值送入到单片机内。系统框图如图2所示。
3 系统的控制算法
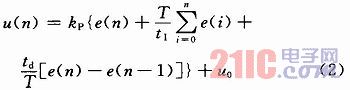
在恒流源的设计中,采用了增量式PID控制,由最为常见的传统式PID控制,比例、积分、微分控制推导而来。传统PID控制回路如图3所示。
PID调节控制器的输出/输入关系的表达式如下:

式中:uT为输出信号,e(t)为输入偏差信号,tD为微分时间,tI为积分时间。在该系统中,单片机对恒流源模块输出进行采样,得出量化数值。所以需将式(1)离散化以求得所需结果:
式中:T为采样周期;e(n)为第n次采样的偏差值;e(n-1)为第n-1次的采样偏差值;u(n)为第n次采样输出值。为使系统具有足够高的精度,必须将采样周期设定的足够小。由式(2)可以看出,如果要得出第n次输出值,需要处理的数据非常庞大,不仅需本次与前一次的偏差信号,而且需要从第一次到第n次的采样偏差值,再将其累加求和。在这一步骤当中,对微控制器所需的内存会有一定要求,并且其计算量繁冗。因此,对其进行化简,由递推原理求得第n-1次输出值,如下:
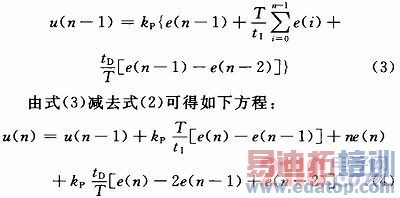
由式(4)可知,如果要得出第n次的输出值,只需求得第n-1次的采样输出值,第n,n-1,n-2次的偏差值,整个过程就简单清晰的多。在该系统中,经过A/D转换所得到的参数就是PID的被控对象。
在整个系统中,通过采用PID控制算法,不仅可以即时的反应出控制系统的偏差信号,减少偏差,而且通过积分控制作用之后,可以消除静差,使系统的精度大幅度提高。另外,在微分控制当中,偏差信号的变化趋势也可以读出。通过反馈作用,可对信号进行修正,从而加快系统的响应速度,减少调节时间。并且可避免因处理器的任何故障而引起的输出信号的大幅度变化。
为了证明增量式PID控制相对于传统PID控制的优越性,本文采用Matlab分别对增量式PID算法和传统PID算法进行仿真比较。
取KP=10,tD=3,tI=0.1,采样时间Ts=0.001。
给出一个叠加的阶跃响应模拟电流值的调节信号输入,分别在1,2.3,3.5,4处将系统输入(即:设定电流值)从0~1,1~1.8,1.8~2,2~2.9进行变化,仿真5s后观察不同控制算法下的响应情况,如图4所示。
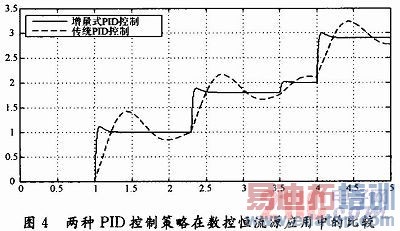
由图4可知,在控制器参数相同的情况下增量式的PID控制算法具有其响应速度更快,超调量更小,优于传统的PID控制。
4 系统的软硬件设计
4.1 软件设计
首先完成系统初始化,给系统变量赋初值,然后进行按键扫描,获取键值,判断设定键,进而进行相应的功能子程序处理。该系统是采用外部中断0来实现实时扫描,使系统进行数值设置。通过外部中断1来实现数值设置值的LED显示。其中LED显示时,每一位显示的间间隔为2ms。在进行数值采样的时,为了有足够的精度,该系统所采用的采样时间间隔为1ms,这里也可以根据工作的需要进行自行设定。主程序流程图如图5所示。
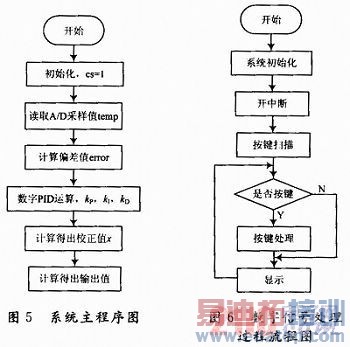
定时器中断实现数字信号处理的整个过程。当中涉及到参数的设定,即校准过程,并且需进行PID控制算法的实现,所以对数字处理这一块会稍微繁琐一些。其流程图如图6所示。
4.2 硬件设计及系统测试
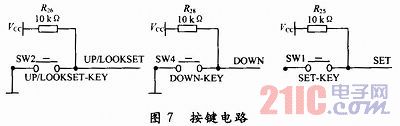
给出本系统几个主要电路图如图7~图9所示。
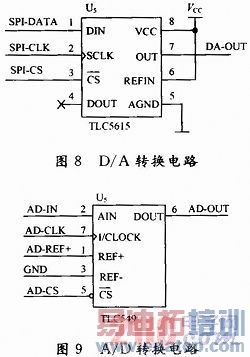
该系统微控制器是采用高性价比AT89S52单片机。D/A转换芯片采用的是10位DAC芯片,A/D转换芯片是采用的美国德州仪器公司生产的8位串行ADC换器芯片。为了能够在实际中验证系统设计的性能采用万用板连接系统各种硬件,经过电路的搭建和程序的烧写得到如图10所示的系统。
在搭建并调试好系统后,下一步工作就是进行数值测定,测试系统各项性能。数值测定结果如下:
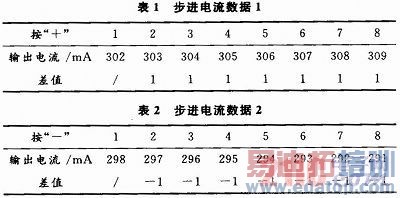
设定电流的300mA,测得步进电流数据如表1、表2所示。
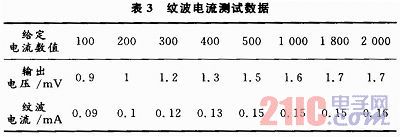
取负载电阻为10Ω,纹波电流=纹波电压/负载电阻,测试数据如表3所示。
5 结语
对该恒流源模块的测量结果表明,其步进分辨率高,纹波小,并且可以手动输入电流20~2000mA之间的数据。可以为各项工程应用提供高稳定度的恒流源。该系统还可采用其他更为先进的控制算法,以求得更好的效果。
作者:张苏红 黄韬 王进华 郑细端 来源:现代电子技术
我推荐大家读
轻松参与
VS
表达立场
这是垃圾文章

