- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
详解无线传感器网络定位技术
录入:edatop.com 点击:
3 主要的WSN 定位方法
WSN 的定位方法较多, 可以根据数据采集和数据处理方式的不同来进行分类。在数据采集方式上, 不同的算法需要采集的信息有所侧重, 如距离、角度、时间或周围锚节点的信息, 其目的都是采集与定位相关的数据, 并使其成为定位计算的基础。在信息处理方式上, 无论是自身处理还是上传至其他处理器处理, 其目的都是将数据转换为坐标, 完成定位功能。目前比较普遍的分类方法有3 种:
1) 依据距离测量与否可划分为: 测距算法和非测距算法。其中测距法是对距离进行直接测量, 非测距法依靠网络连通度实现定位, 测距法的精度一般高于非测距法, 但测距法对节点本身硬件要求较高,在某些特定场合, 如在一个规模较大且锚节点稀疏的网络中, 待定位节点无法与足够多的锚节点进行直接通信测距, 普通测距方法很难进行定位, 此时需要考虑用非测距的方式来估计节点之间的距离,两种算法均有其自身的局限性;2) 依据节点连通度和拓扑分类可划分为: 单跳算法和多跳算法。单跳算法较多跳算法来说更加的简便易行, 但是存在着可测量范围过小的问题, 多跳算法的应用更为广泛, 当测量范围较广导致两个节点无法直接通信的情况较多时, 需要多跳通信来解决;3) 依据信息处理的实现方式可划分为: 分布式算法和集中式算法。以监测和控制为目的算法因为其数据要在数据中心汇总和处理, 大多使用集中式算法, 其精度较高, 但通信量较大。分布式算法是传感器节点在采集周围节点的信息后, 在其自身的后台执行定位算法, 该方法可以降低网络通信量, 但目前节点的能量、计算能力及存储能力有限, 复杂的算法难以在实际平台中实现。
普遍认为基于测距和非测距的算法分类更为清晰, 本文以其为分类原则介绍主要的WSN 定位方法。此外, 由于目前非测距算法大多为理论研究, 且实用性较差, 因此, 本文将着重介绍基于测距的定位方法。
3.1 基于测距的算法
基于测距的算法通常分为2个步骤, 首先利用某种测量方法测量距离(或角度), 接着利用测得的距离(或角度)计算未知节点坐标。下面分别进行介绍。
3.1.1 距离的测量方法
本节将详细说明3 种主流的测量方法, 第一种是基于时间的方法, 包括基于信号传输时间的方法(time of arrival, TOA)和基于信号传输时间差的方法(time difference of arrival, TDOA); 第二种是基于信号角度的方法(angle of arrival, AOA); 第三种是基于信号接收信号强度的方法(received signal strengthindicator, RSSI)方法。下面分别进行介绍。
1) 基于时间的方法
a. 基于信号传输时间的方法:
TOA 技术通过测量信号的传播时间来计算距离,该技术可分为单程测距和双程测距, 单程测距即信号只传输一次, 双程测距即信号到达后立即发回。前者需要两个通信节点之间具有严格的时间同步, 后者则不需要时间同步, 但是本地时钟的误差同样会造成很大的距离偏差。最典型的应用就是GPS 定位系统。
优点: 测量方法简单且能取得较高的定位精度。
缺点: Ⅰ。 精确计时难。通常传感节点之间通信都采用无线电信号, 由于无线电的传输速度非常快,而传感节点之间的距离又较小, 这使得计算发送节点和接收节点之间的信号传输时间非常困难。因此利用此技术定位的节点需要采用特殊硬件来产生用于发送和接收的慢速无线信号。Ⅱ。 高精度同步难。
有些算法还需要接收节点和发送节点之间具有严格的时间同步, 时间同步的问题现在也是无线传感器网络中的一个研究热点并且没有完全解决, 这也限制了算法的实用性。Ⅲ。 易受噪声影响。在空间传输的信号会受到各种噪声的影响, 所以即使在不同的测量中得到了相同的信号传输时间也不能断定这两次测量中的发送节点和接收节点间的距离是相同的。
最早的TOA 距离估计算法是在非时间同步网络中利用对称双程测距协议进行测量的。之后, 单边测距方法在后续的研究中被提出, 如Harter 开发的Active Bat 定位系统[10], 它由一系列固定在网格中的节点组成。固定节点从移动节点中接收超声波, 并通过TOA 算法计算到移动节点的距离, 在通信范围30 m 左右的情况下, 其定位精度达到9 cm, 相对精度9.3%。但TOA 只有在视距(line-of-sight, LOS)的情况下才比较精确, 在非视距(none line-of-sight, NLOS)情况下, 随着传播距离的增加测量误差也会相应增大。综述了在视距和非视距情况下多种TOA 距离估计方法所需要的复杂度, 先验知识和实验结果等。Hangoo Kang 等人在多径环境下利用基于啁啾展频技术(chirp spread spectrum, CSS) 和对称双边双向测距技术(symmetric double sided two-wayranging, SDS-TWR) 的TOA 定位系统中提出了误差补偿算法, 取得了较好的定位效果, 在此基础上Andreas Lewandowski 等人提出了一种加权的TOA 算法, 该算法应用于工业环境下, 可提高系统容错性, 降低自身对测距系统的干扰, 在7 m×24.5 m 的范围内, 测距误差小于3 m。
b. 基于信号传输时间差的方法:
TDOA 测距技术广泛应用于无线传感器网络的定位方案中。通常在节点上安装超声波收发器和射频收发器, 测距时锚节点同时发送超声波和电磁波,接收节点通过两种信号到达时间差来计算两点之间距离。
优点: 在LOS 情况下能取得较高的定位精度。
缺点: Ⅰ。 硬件需求较高。传感节点上必须附加特殊的硬件声波或超声波收发器, 这会增加传感节点的成本; Ⅱ。 传输信号易受环境影响。声波或者超声波在空气中的传输特性和一般的无线电波不同,空气的温度、湿度或风速都会对声波的传输速度产生较大的影响, 这就使得距离的估计可能出现一定的偏差, 使用超声波与RF 到达时间差的测距范围为5~7 m, 实用性不强, 且超声波传播方向单一, 不适合面向多点传播; Ⅲ。 应用场合单一。测距的前提是发送节点和接收节点之间没有障碍物阻隔, 在有障碍物的情况下会出现声波的反射、折射和衍射, 此时得到的实际传输时间将变大, 在这种传输时间下估算出的距离也将出现较大的误差。
由MIT 开发出的Cricket 室内定位系统最早采用了RF 信号与超声波信号组合的TDOA测距技术, 在2 m×2 m×2.5 m 的范围内, 该系统定位精度在10 cm以下, 现已成为Crossbow 的商业化产品。加利福尼亚大学洛杉矶分校的Medusa 节点在AHLos定位系统之间传输距离为3 m 左右时, 测距精度能够达到厘米级别。加州大学伯克利分校开发的Calamari定位系统均采用TDOA 超声波测距, 在144 m2 的区域部署49 个节点, 平均定位误差达到0.78 m, 文献对于声波收发器的方向单一性问题, 给出了两种解决方法: 一是将多个传感器调整成向外发射的形状; 二是在节点的平面上使用金属圆锥来均匀地传播和收集声波能量。结合TDOA 测距机制和NTP 协议时间同步原理, 一些学者提出了时间同步与节点测距混合算法, 结合基于到达时间差的测距机制和网络时间协议中的时钟同步机制, 通过逆推时间非同步情况下相互测距的意义, 不仅能实现时间同步, 还可以实现相对测距甚至绝对测距。
基于时间的定位方法的定位精度虽高, 但从上面的例子中可以看出其测距距离较短, 且附加的硬件将增加节点的体积和功耗, 不适于实际应用。
2) 基于信号到达角度的方法
AOA 测距技术依靠在节点上安装天线阵列来获得角度信息。由于大部分节点的天线都是全向的, 无法区分信号来自于哪个方向。因此该技术需要特殊的硬件设备如天线阵列或有向天线等来支持。
优点: 能够取得不错的精度。
缺点: 传感节点最耗能的部分就是通信模块,所以装有天线阵列的节点的耗能、尺寸以及价格都要超过普通的传感节点, 与无线传感器网络低成本和低能耗的特性相违背, 所以实用性较差。
关于AOA 定位的文献比较少,最早提出在室内采集方向信息, 并以此实现定位的方法,它的硬件部分包括微控制器、RF 接收器、5 个排成"V"型的超声波接收器, 其测量误差精度为5°。随后, 一些学者提出了在只有部分节点有定位能力的情况下确定所有节点的方向和位置信息的算法。
3) 基于接收信号强度的方法
RSSI 是在已知发射功率的前提下, 接收节点测量接收功率, 计算传播损耗, 并使用信号传播模型将损耗转化为距离。
优点: 低成本。每个无线传感节点都具有通信模块, 获取RSSI 值十分容易, 无需额外硬件。
缺点: 1) 锚节点数量需求多。由于RSSI 值在实际应用中的规律性较差, 使得利用RSSI 信息进行定位的算法在定位精度以及实用性上存在缺陷。所以为了达到较高的定位精度, 利用RSSI 信息进行定位的算法通常需要较多数量的锚节点。2) 多路径反射、非视线问题等因素都会影响距离测量的精度。
早期的RSSI 距离测量方法有Hightower 等人设计的室内定位SpotON tags 系统, 通过RSSI 方法来估计两点间的距离, 通过节点间的相互位置来进行定位, 在边长3 m 的立方体内, 其定位精度在1 m 以内。目前, 基于RSSI 值的距离测量方法可以分为2 种, 一种是需要预先测试环境信息的方法, 即在实验开始前, 对定位的区域进行大量的RSSI 值测试,将不同点得到的RSSI 值保存到数据库中, 建成场强图或拟合曲线, 在实际测试时查询和调用。另外一种是无需预先测试环境信息的方法, 直接在定位区域进行节点布置和定位, 如双曲线模型法,迭代的分布式算法, 结合露珠洪泛思想引入RSSI 机制的HCRL(hop-count-ratio based localization)算法等。
总体来说, 需要预先测试环境参数的方法在实际定位中计算量小, 这类方法只需要简单的查表或根据拟合曲线进行计算, 其缺点是实验前需要做大量的准备工作, 而且一旦环境改变则预先建立的模型将不再适用。无需预先测试环境参数的方法需要定位引擎的计算操作, 往往具有复杂的计算过程,但适应性较强。
以上几种测距方法各有利弊, 以2009 年发表的基于测距法的文献来看, 研究RSSI 方法的大约占了以上几种方法总数的52%, TOA 方法25%, TDOA 方法13%和AOA 方法10%, 其比例图如图1 所示, 从实用性的角度来看, 基于RSSI 的定位方法更简便易行, 因此, 基于RSSI 测距方法的研究占基于测距算法研究总数的一半以上。
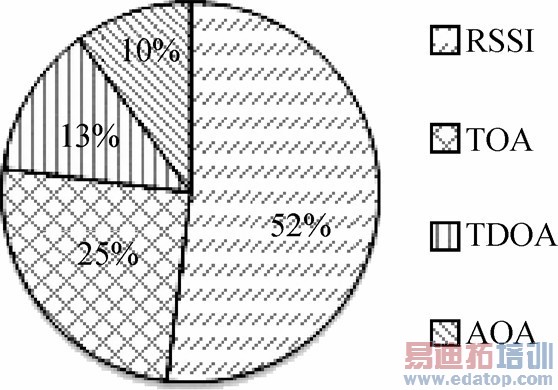
图1 各类方法研究比例图
1 2 3 4 5
上一篇:基于3G网络的HFC监控系统设计与实现
下一篇:详解物联网技术框架

