- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
单片机控制的智能温室物联网应用系统设计
录入:edatop.com 点击:
3.3 环境控制执行单元
系统自动检测温室内的温度和湿度,控制执行单元驱动通风机、加热器、喷淋水泵、遮阳幕帘等设备,是智能控制系 统的执行者。控制系统启动后检测温室内的温度,当温度低于设定值时,启动加热循环水升温。
本系统在植物底部和温室上方安装热水管道进行加温,管道内水温控 制在60~80℃,底部加温对植物的健康成长十分有益;上方管道加温使温室加热均匀,有利于植物生长。当温室的温度高于设定值时,开启通风机降温;若湿度 低于某设定值时,启动喷雾水泵增湿,反之,启动通风机去湿。
系统硬件电路如图3所示,单片机的P1口输出控制信号,实现对温室内各环境参数的调节,为避免电机产生的电磁干扰,采用光电耦合器隔离单片机I/O口与驱动电路。
4 温室控制系统软件设计
本系统软件采用模块化设计,C语言编写。考虑到温室多参数控制的复杂性,本系统采用优先调节原则,即在温室环境温度、湿度等要素中选择1个作为主要的控制 要素,然后再对其他要素进行控制,这样做的目的是减小系统控制复杂度。
控制过程中考虑到检测和控制需要经过一段时间的延时,如温室喷雾后的一段时间内,空气水雾影响空气湿度正常检测的问题等。
软件设计中的程序模块主要包括主程序、温度采集子程序以及显示子程序等。系统主程序流程如图4所示,系统正常运行前首先进行初始化,设定温室内植物生长所 需的温度和湿度参数。然后检测温室内的主要参数——温度,调用温度采集子程序,与设定值比较判断并进行相应的处理,若温度合适,再检测其湿度参数。
温度采集子程序流程图如图5所示,温度采集使用的是一线式数字温度传感器DS18B20,其工作过程严格遵循单总线协议。
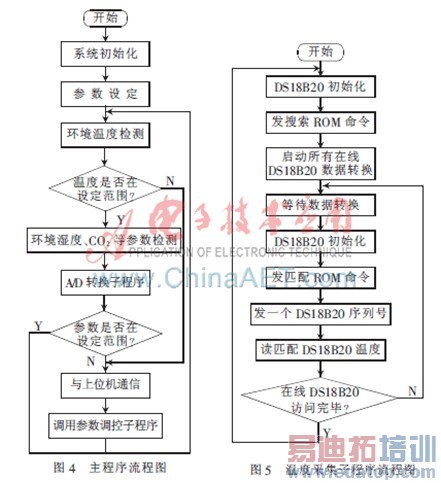
主机首先发一个复位脉冲, 使所有挂在总线上的DS18B20芯片复位,接着发送ROM操作命令启动数据转换并延时等待。工作中系统对DS18B20的操作以ROM命令和存储器命令 形式出现,其中ROM操作命令均为8位长,命令代码分别为:读ROM(33H)、匹配ROM(55H)、跳过ROM(CCH)、搜索ROM(F0H)和告 警搜索(ECH)命令。
存储器操作命令为:写暂存存储器(4EH)、读暂存存储器(BEH)、复制暂存存储器(48H)、温度变换(44H)、重新调出 EERAM(B8H)和读电源供电方式(B4H)命令等。单片机采集温度时,需要先发1个保持480 μs~960 μs的低电平复位脉冲,然后释放总线,等待DS18B20的应答信号。
DS18B20在接收到复位脉冲后等待15~60 μs发出应答脉冲,应答脉冲保持60~240 μs。单片机从发送完复位脉冲到再次控制总线至少需要等待480 μs才能进行读写操作。
利用DS18B20温度传感器检测温度,实现单总线挂接多个传感器对多点或多室温度进行检测,但实际应用中单总线上传感器多于8个时,系统程序运行不正常,而线缆过长也造成测温数据错误,在现场布线中使用屏蔽电缆减少环境干扰。
植物温室智能控制系统采用先进的传感器技术和单片机技术,对环境的温度和湿度等参数进行检测及控制,集监、控、管于一体的温室智能化监控系统,实现了对植 物生长环境的智能化控制,改变了传统温室依靠人工操作的缺点,且基于单片机的控制系统实现了智能化、节能化、网络化,是现代温室智能控制的发展方向。
1 2 3
上一篇:电信级以太网基本知识
下一篇:UniPON新型网络架构

