- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
2-DCCF卫星定位信号接收机的设计
录入:edatop.com 点击:
摘要:介绍了当今卫星定位系统(GNSS)接收机中的天线赋形技术、软件无线电技术和FPGA实现技术,以及它们在二维弹道修正引信(2-DCCF)的应用。最后,文中给出了用于旋转弹二维弹道修正引信的GPS接收系统的工作原理框图。
关键词:二维弹道修正引信;卫星定位信号接收机;旋转弹
Abstract: In this paper, the beam-forming antenna, SDR ( Software Defined Radio) and FPGA (Field Programable Gate Array) technologies utilized in global navigation satellite system(GNSS) are introduced. In addition, their applications in 2-Dimension Correction Course Fuze(2-DCCF) are discussed in detail. At last, the principle block diagram of 2-DCCF GPS receiver in spinning projectile is given here.
Keywords: 2-DCCF;GNSS Receiver;Spinning Projectile
1 引言
70年代中期,美国人Sanders Associates最早提出弹道修正引信的概念。弹道修正引信(Course Correcting Fuze,CCF)是指在引信中采取相关措施来实现弹丸飞行弹道的简易控制、从而达到减小弹丸落点散布目的的一种新概念引信。它通过对传统引信的改造,使其增加了弹道修正的功能,开拓了一条低成本、高效益的炮兵弹药精确化之路。弹道修正引信不仅具有传统引信系统的保证弹药安全和控制战斗部起爆的功能,还具有感知及辨识弹道环境和修正弹道的功能。按修正效能的不同分为一维(1-DCCF)和二维弹道修正引信(2-DCCF)。二维弹道修正引信不仅可以对弹道进行射程修正,而且还可以进行方向修正,因此精度更高。二维弹道修正引信实现的方法是:在原有的炮弹引信中,增加弹道修正模块,由传感器探知飞行中的弹丸在某个时刻的空间位置,将此位置与预定弹道相比较,根据偏差的大小,产生弹道修正指令并输出给相应的执行装置进行距离和方向的修正。
目前,在旋转载体中主要采用惯性器件、地磁传感器和GPS来测量弹道及弹丸运动参数。使用惯性器件测量姿态是很复杂的,且积累误差很大。如小型陀螺仪刻度不准就会导致每旋转一圈都会产生一个小误差;在旋转的情况下,这种误差会很快的积累起来。其它的传感器例如磁探测器也可以用于测量弹丸旋转速度,但是使用这种器件需要考虑弹道和地磁场的角度几何关系,以及弹丸的磁特性。
卫星定位接收组件作为二维弹道修正引信的一个重要的弹道参数敏感元件得到了广泛的重视。它在引信中的基本功能是用来提供炮弹当前的位置信息,并传送给信息处理机构,用以控制引信机构进行正确的动作。它的主要优点有:
全天候工作,没有地理位置(如高纬度,高海拔)限制;
精度高,实时性好。利用差分等手段可以达到米级测量精度;
没有时间误差累积。
本课题就是将GPS作为二维弹道修正引信的弹道敏感器应用到弹道修正引信上,解决二维弹道修正引信用卫星定位接收系统在旋转、高速等动态条件下的定位问题。
2 2-DCCF引信用卫星定位信号接收机中的关键技术
众所周知,GPS接收系统已应用到民用和军用等各个领域。2-DCCF卫星定位信号接收系统作为GPS接收系统的特例,其中涉及到了一些关键技术,主要有一下几个方面。
(1)多天线信息融合技术
天线技术成为GPS接收信号的关键。目前国内外常采用全向天线或自适应天线技术,解决高旋转和高动态环境下卫星定位信号的接收问题。前者系统设计简单,现有产品多采用该技术方案;但是由于全向接收无线信号,存在抗干扰能力差的缺点;后者通过选择性接收卫星来波方向信号,一定程度上提高了抗干扰能力,但系统设计复杂(尤其是射频信号处理部分),对于射频信号处理技术落后的我国,不利于无线信号接收系统整体的优化设计和小型化设计。本课题采用的多天线波束赋形天线技术(beam-steering)是指在信号的发射端和/或接收端有多根天线,该阵列的输出与卫星信号接收机的多个输入相结合,可提供一个综合的信号。与单个天线不同的是,天线阵列系统能够动态地调整波束方向,以使其都获得最大的主瓣,并减小了旁瓣干扰。这样不仅改善了信号干扰比,还扩大了覆盖范围。国外的文献中介绍较多的是采用4元或8元阵列,来提高抗干扰能力。多天线赋形结构的原理如图1所示。
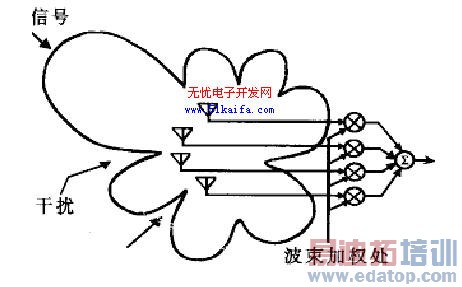
图1
(2)GPS/IMU的信息融合技术
充分利用GPS和惯性测量组合(IMU)各自的优点和应用特点,采用GPS/IMU融合的结构。在融合结构上采用多层次结构,如图2所示。
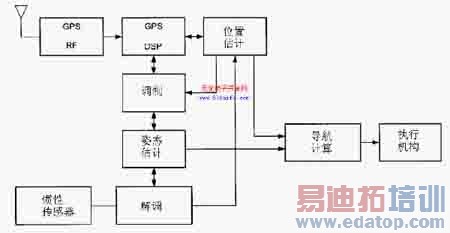
图2
首先,在传感器层,惯性传感器融合了陀螺仪和加速度计等的信息,GPS接收机融合了多个卫星和天线的信息;然后,系统对GPS系统的输出信息和IMU的输出信息进行融合,得到准确的方位信息,从而提高了打击精度。在算法上,采用卡尔曼滤波法。该方法大大减少了计算量,融合方法简单有效;并且由于信息分配因子的引入,使得系统的容错性得到很大改善。当然,在以后的研究中还可以考虑采用卡尔曼滤波法与其他算法如人工智能等组合的算法,以提高效率。
(3)软件无线电技术
高性能DSP技术的发展,使得GPS接收机的一些功能可通过软件来实现。这里,为减小体积、适应引信的要求,在GPS接收机中采用了软件无线电技术,如图3所示。右侧的虚线框内表示的就是DSP实现的软件无线电技术。
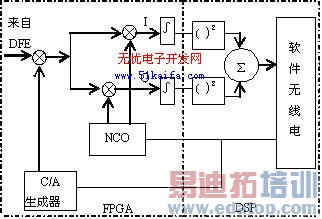
图3
信号的处理和控制功能都由DSP的软件来实现,从而使系统硬件结构变得简单。通过软件无线电技术(SDR)实现卫星定位信号处理算法的通用性和灵活性设计。由于其对实时性的要求不是很高,可以在后续的处理当中进行进一步的优化和功能的增强,以进一步提高其抗干扰等能力。
基于软件实现的GPS接收系统主要完成如下功能:
利用信号特点选择性接收卫星来波方向信号,去掉智能天线的加权微波网络,采用数字技术替代模拟技术完成对多路信号加权融合。简化了接收机高频部分的设计,提高了系统可靠性和通用性。
在一个DSP芯片中完成实现旋转解调,环路跟踪和抗干扰等算法;还可根据情况,在硬件平台不变的情况下,进行适时修改,提高了系统的通用性和灵活性;同时,可更加灵活有效地采用抗干扰技术,提高了系统的抗干扰能力。
(4)FPGA技术的应用
随着FPGA技术的发展,GPS接收机的很多解决方案可通过FPGA中来实现。为提高GPS的捕获和跟踪速度,如图3所示的左侧虚线框内的功能由FPGA来实现。在GPS接收机的信息处理过程中,有相当一部分工作可由FPGA来完成,从而大大提高系统的响应速度。图4所示的是其中最常见的相关运算及其FPGA实现。
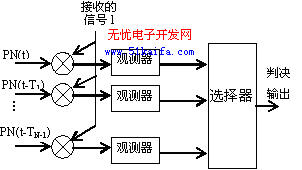
图4
3 系统总体设计
在射频(RF)部分,选用2或4片贴片式指向性(directional)天线接收信号,利用信号特点选择性接收卫星来波方向信号,根据旋转角度的不同,采用软件技术动态地对信号加权融合。简单来讲,就是当天线正对着卫星时,信噪比最大,此时加大加权系数;当天线背对着卫星时,信噪比最差,此时取加权系数为0。这样,既简化了接收机高频部分的设计,又较好地实现了抗干扰性能。而经典的设计中往往多采用全向天线,它们在所有的角度上都受到噪声和干扰信号的影响,系统的抗干扰能力较差。由于采用了指向性天线,使得旋转对卫星信号的调制效果更加明显,因而也容易进行旋转的解调。所谓旋转解调,实际上就是从受旋转"污染"的信号中提取有用的数据信号;同时,还可以从中获取旋转的姿态信号(或者说进行旋转跟踪)。GPS接收系统的组成框图如图5所示。

图5
系统的工作原理与过程是:信号在由天线接收后,经过前置放大后传给射频前端,在射频前端进行下变频,将信号变为中频,在中频上进行A/D变换,变为数字中频后传送到数字接收机通道进行处理。输入信号的FFT对应地与本地产生的伪随机码的复共轭FFT相乘,最后对乘积进行逆变换IFFT,从而得到了所有码片间隔上的相关值。若所有相位上的信号都比预设的门限值小,调整本地的调制信号继续搜索;否则,停止搜索转入跟踪。通过载波和相位的跟踪环路将信号中的伪距信息提取出来送给接收机处理器,计算出三维坐标信息。
4 结语
2-DCCF引信用卫星定位信号接收系统具有如下优点:
接收机系统结构简单。简化了天线和射频信号处理部分设计,为研制高速旋转弹引信用微小型卫星定位信号接收机创造条件。
软件GPS接收机的软件功能强大。与传统的GPS接收机相比,它的信号处理能力更强,尤其在恶劣条件下通过信息的存储和再处理,可实现增强的信息处理。
可靠性高,抗干扰能力强。采用数字信号处理技术和抗干扰技术,选择性接收卫星来波方向信号,既可保证高速旋转和高动态环境下卫星定位信号的可靠获取,又能有效屏蔽地面干扰,提高接收机适应战场电磁环境的能力。
IMU辅助的GPS接收技术使得导航精度更高。GPS将GPS测量的空间(三维)位置信息、速度信息和时间信息(PVT)送入信号处理器,对测量数据进行处理和计算,辨识实际弹道;从而产生导航解,为弹道修正引信进行简易制导提供依据;同时,融合惯性组合(加速度计、陀螺仪)提供的测量信息,更好地实现了二维弹道修正引信的弹道辨识。
本文的创新点在于:旨在解决二维弹道修正引信用卫星定位接收系统在旋转、高速条件下的稳定定位问题。在引信系统分析的基础上,研究了旋转条件下可靠接收卫星定位信号的电路设计,提出了基于软件无线电技术的旋转弹引信用卫星定位信号处理算法,以及GPS/IMU信息融合的二维弹道修正引信弹道辨识方法。
参考文献
[1] James H. Doty, Advanced Spinning-Vehicle Navigation—A New Technique in Navigation of Munitions. Rockwell Collins, Inc. ION 57th Annual Meeting/CIGTF 20th Biennial Guidance Test Symposium, 11-13 June 2001, Albuquerque, NM
[2] 张剑. 旋转弹弹道修正引信用卫星定位接收系统原理研究,北京理工大学博士论文,2005
[3] 伍蔡伦. GPS信号的捕获与跟踪方案研究. 北京理工大学硕士学位论文. 2006
[4] 张欣. 扩频通信数字基带信号处理算法及其VLSI实现. 科学出版社, 2004
[5] 杨跃忠等. 自适应LMS滤波器在FPGA中的实现[J]. 微计算机信息,2006.4-2
[6] Alison Brown, NAVSYS Corporation. Benefits of Software GPS Receivers for Enhanced Signal Processing. Published in GPS SOLUTIONS 4(1) Summer, 2000, pages 56-66.
[7] 安建平. 扩频通信讲义. 北京理工大学. 2006
作者:肖洪兵 李世义 申强 谌德荣 来源:微计算机信息
上一篇:无线信道仿真技术应对MIMO新挑战
下一篇:摩托罗拉CDMA EV-DO解决方案

