- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
如何构建专属自己的CAN-bus应用层协议
录入:edatop.com 点击:
随着CAN-bus相关芯片价格的下降,内置CAN控制器MCU的增多,CAN-bus当前已经进入了众多早期由于成本问题无法使用的领域,成为极具生命力的现场总线,今天我们就来探讨如何构建专属自己的CAN-bus应用层协议。
在CAN-bus网络上,CAN报文以广播的形式发送,CAN报文不包含地址信息,是否处理接收到的CAN报文由接收点的软件确定。CAN-bus只提供可靠的报文传输服务,CAN报文的使用由应用者定义, 所以CAN网络中的节点要相互通信就必须制定一个统一的规则。CAN应用层协议就是这样一个规则。
这个规则,定义了CAN报文中帧ID及帧数据的使用方式,如将帧ID定义为需要处理该帧数据的CAN节点地址等。根据应用场合的不同,国际上出现了多种CAN应用层协议,常见的CAN-bus应用层协议如下:
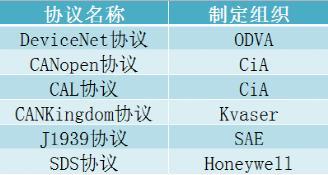
图1
接下来,我们看一下如何构建CAN-bus应用层协议
l构建一个现场总线网络,需要解决的关键技术问题有:
l总线传输信息的速度、容量、优先等级、节点容量等;
l高电磁干扰环境下的可靠数据传输;
l最大传输距离时延时大小的确定;
l网络的容错技术;
l网络的监控和故障诊断功能。
要解决以上问题,需要充分考虑现场总线网络所采用的总线类型,因为以上问题和总线的性能特点是密切相关的,那么我们就看一下CAN-bus总线的上述特性:
lCAN-bus网络传输速度最高可达1Mbps,并采用无损仲裁,通过报文标识符指示报文优先级;
lCAN-bus采用差分信号传输,并采用可靠的数据校验和错误检测机制;
lCAN-bus采用帧传输,每个报文允许传输最多8个字节,帧结构有严格规定,能够确定最大传输延时;
lCAN-bus具有可靠的错误机制和检测机制,发送的信息遭到破坏后可以重新发送;节点在错误严重的情况下,具有自动退出总线的功能;
l可以通过制定严禁的CAN-bus应用层协议解决网络监控和诊断。
CAN报文的分配
包含报文标识符的分配和报文数据的分配,报文格式的定义,实质是将CAN报文的分配规则进行详细的描述。
报文ID的定义:
CAN2.0A帧:11位ID
CAN2.0B帧,29位ID
报文数据的定义:每帧报文最多包含8字节数据
CAN网络数据通信的实现
在CAN网络中,通过报文的标识符进行信息的区分,因此通过报文的各种标识符分配来达到建立信息链接的目的。
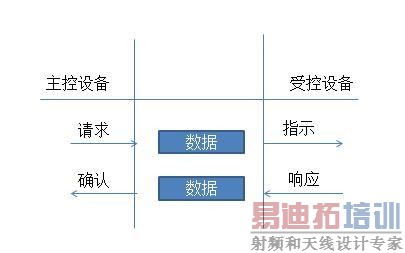
图2 命令/响应模式通信
CAN应用层协议:面向节点和面向报文的协议
数据通信协议基本上可以划分为"面向节点的协议"和"面向报文的协议"两种类型,如下图:
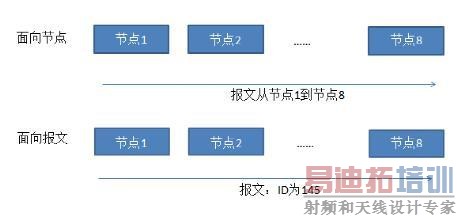
图3:面向节点和面向报文的数据通信
制定一个CAN应用层协议
为了给读者演示CAN应用层协议的开发和使用方法,下面定义一个简单的CAN应用协议栈,该协议栈中只用到CAN标准帧中的数据帧,帧ID中的11个位的分配和使用方法如下表所列,协议中另外还定义了功能参数长度变量FunDataLen的功能参数数组FunData,该数组在需要时可以为某些特定功能函数提供足够的控制参数。
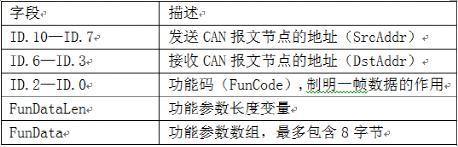
图4

