- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
智能机器人控制系统的设计与实现
录入:edatop.com 点击:
1 前 言
机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如"NHK杯大学生机器人大赛"、"全日本机器人相扑大会"、"机器人足球赛"等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识。
开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。
2 机器人要完成的功能
选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。
3 硬件设计方案
机器人总体构成
机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如"NHK杯大学生机器人大赛"、"全日本机器人相扑大会"、"机器人足球赛"等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识。
开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。
2 机器人要完成的功能
选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。
3 硬件设计方案
机器人总体构成
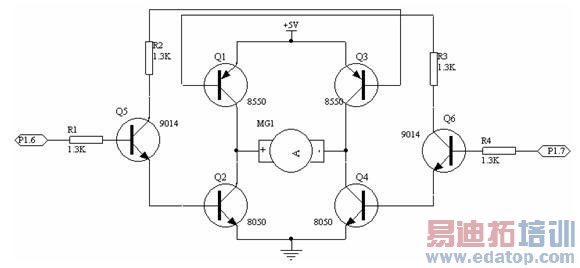
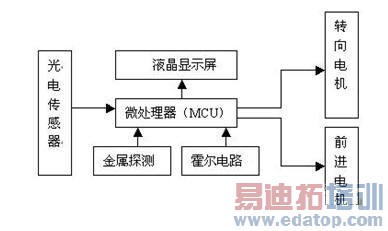 图1 机器人总体构成 如图1所示,以微处理器为核心,接受传感器传来外部信息,进行处理,控制机器人的运行。 系统电源供电部分 由于机器人电机,传感器及系统CPU等部分均采用+5V供电,考虑电动车功率和车载质量及摩擦阻力问题,电源我们采用电动车自带干电池组,功耗小、体积小和质量轻,安装较为方便。 电机驱动及PWM调速部分 机器人需控制在一个合适的速度行驶,速度太快,因单片机对各传感器传来的信号有一个响应、处理时间,小车极易偏离轨道。小车的速度是由后轮直流电机转速控制,改变直流电机转速通常采用调压、调磁等方式来实现。其中,调压方式原理简单,易与实现。 采用由晶体管组成的H型PWM调制电路。通过图2所示PWM调制电路,用单片机控制晶体管使之工作在占空比可调状态,实现调速。
|