- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于PID控制粉尘浓度测量仪的实现
录入:edatop.com 点击:
类别:自动化测试(推荐)
随着我国现代工业的发展,空气中粉尘的污染越来越严重,这一污染严重危害着人类健康,因此粉尘浓度的测量在治理环境污染,,と死嘟】盗煊蛑幸庖逯卮蟆7鄢九ǘ鹊牟饬糠椒ǘ嘀侄嘌,目前我国一些环保部门仍采用“滤膜称重法”测量粉尘浓度,这种方法不能实现在线连续测量,且测量误差较大。国外均采用基于光散射理论的在线测量,该技术已非常成熟。目前我国也展开了基于光散射测量粉尘技术的研究,但与国外技术相比,还有很大差距。在多年对光散射法测量粉尘浓度的研究中体会到这种方法的测量范围小,仪器数据显示不稳定,本文提出一种自适应测量方法,通过实验验证,该方法能有效扩大测量范围,减小振荡。
1 仪器的总体设计
测量仪主要由光学传感器、气路系统、光/电转换、放大器、A/D转换、微机控制与管理系统、电源系统组成,其总体结构如图1所示。仪器的工作过程如下:

由半导体激光器发出的光波穿过具有粉尘的被测区域后,光学传感器将接收到的光信号转换成电信号。为确保能对信号直接进行A/D转换,提高信号的抗干扰能力和仪器的灵敏度,还必须对信号进行调理。调理后的电信号通过A/D转换后再传送到微处理器,通过微处理器对数据进行处理分析再显示。
2 自适应测量的实现
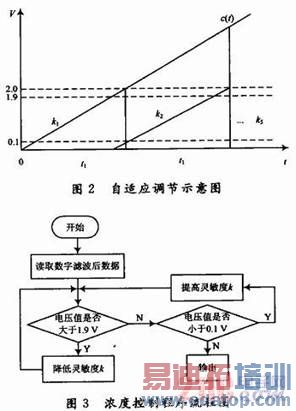
2.1 自适应调节原理
采用一般传感器测量粉尘浓度,其测量范围约为0~3 mg/m3。为保证高浓度和低浓度的测量准确性,扩大仪器的测量范围,本文提出了一种通过调节传感器接收灵敏度来实现自适应调节的算法(调节原理如图2所示),即当被测环境的粉尘浓度较低时,提高传感器的接收灵敏度,当被测环境的粉尘浓度较高时,降低传感器的接收灵敏度,并通过实验对这种方法进行了验证,图3是软件控制流程图。
2.2 实现电路
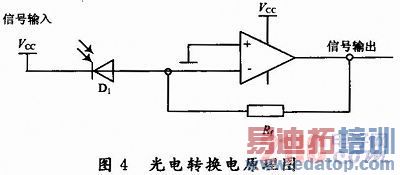
图4是光电转换原理图,Rf是程控的电阻调节网络,通过对Rf值的调节,改变传感器的接收灵敏度,使不同信号值均能得到有效测量。其功能实现如下:当仪器进入测量时,微处理器发出控制命令,使传感器处于接收灵敏度最高状态。读取数据后判断传感器是否处于最佳工作状态,若发现溢出或不在最佳工作状态,则改变传感器的接收灵敏度,使其进入最佳的工作状态。为了使测量数据统一,通过软件对测得的数据进行修正。
3 测量数据的控制与处理
3.1 测量数据的滤波处理
该测量仪是数据更新率较高的实时系统,为克服采集系统采集数据时随机干扰带来的误差,软件上对测得的数据进行了数字滤波,鉴于滑动平均滤波算法具有能够良好抑制周期性干扰,平滑度高的特点,这里选取滑动平均滤波法。其原理是:将测量数据看成一个长度为N的队列,把每次的采样新值放人队尾,队首的一个数据出列,其他数据前移一位,这样队列中始终有N个“最新”数据,再将队列中的N个数据进行数学平均,从而得到新的滤波值。其数学表达式为:
![]()
式中:
![]() 为第n次采样滤波后的输出,Xn-i为未经滤波的第n-i次采样,N为滑动平均项数。
为第n次采样滤波后的输出,Xn-i为未经滤波的第n-i次采样,N为滑动平均项数。
数据采集过程如下:按测量键后,连续采样1 min(1 min采样10次),此次测量显示这一分钟内采样值的平均值,继续采样,此时显示值为此次采样值与前九次采样值的平均值,即每6 s得一个数据值,LCD可以连续显示。当切换测量挡时,延时采样0.5s。
3.2 PID控制系统
为防止调节传感器接收灵敏度时由于超调或者失调引起的振荡,使仪器读数能够平缓上升或者下降,这里采用PID算法加以调节,以对振荡进行抑制,在控制过程中采用智能判断的方法使系统处于最优状态。PID调节器具有规律简单,运行可靠,易于实现等特点。
图5是PID控制的基本原理示意图,其基本输入输出关系可表示为:
![]()
式中:μ(t)为控制器输出,e(t)为控制器输入的偏差信号,e(t)=r(t)-c(t)。

比例环节调整系统的开环比例系数,提高系统的稳态精度,降低系统的惰性,加快响应速度,积分环节可以提高系统的型别,消除或减小稳态误差,使系统的稳态性能得到改善,微分控制使得系统的响应速度变快,超调减小,振荡减轻。PID控制过程调节流程如图6所示。
3.3 PID参数的设定
PID控制参数的设定是控制系统设计的核心内容,它是根据被控对象的特性确定PID控制器的比例系数、积分时间和微分时间的大小,确保其在系统受到扰动后仍保持稳定并将误差保持在最小值。
3.3.1 PID参数的初始值
Ziegler Nichols方法是基于简单被控过程的Niquist曲线的临界点计算PID参数初值,其整定准则是要求系统的暂态过程衰减率为0.75,该算法简单,使用方便。本文采用4:1的衰减比性能准则获得PID参数的初始值。
设控制系统有一响应曲线,如图7所示,给系统加一阶跃输入U,可用一阶延时系统近似为:
![]()
式中:K为放大系数,τ为滞后时间,T为时间常数。
设输出值达到设定值的50%和75%时所用的时间分别为:t1和t2,则PID参数的初始值可表示为比例系数Kp=1.2U/(RL),积分时间常数TI=2L,微分时间常数TD=0.5L。其中:斜率R=(0.75-0.5)V/(t2-t1),滞后L=t1-(2V0-4V1)(t2-t1)/V。

3.3.2 PID的自校正调节原理
本文利用测量误差改变调节器的步长,实现PID参数的自动整定,使输出值平稳快速地达到设定值。首先将采样值与给定值的误差绝对值分成若干个区间,各区间设定不同的步长,采用不同的计算式。这里PID参数的调整周期应小于采样周期,采样周期由整个放大电路的传输延时和后续A/D转换器的性能指标决定。
3.4 中断服务程序
中断服务程序流程图如图8所示。
4 实验结果与分析
实验时对烟雾释放出的粉尘浓度进行了测量。图9和图10分别是未加自适应测量功能和加了自适应测量功能测得的粉尘浓度值及其拟合曲线。图中“*”是采样得到的粉尘浓度值,“——”是用Matlab对测得的数据点进行拟合后的曲线。由图9可以看出,当粉尘浓度达到3.1 mg/m3时,浓度不再变化,仪器达到饱和。由图10可知:浓度较低时,仪器的响应曲线线性度较好,能够完整地反应粉尘浓度的变化过程,可测得48 mg/m3的浓度值,测量范围大大地扩大了。采用PID加以控制,数据的平滑度较好,几乎没有超调,测量值能够平稳的上升,达到了预期的效果。

5 结语
通过实验验证,采用这种自适应测量的方法可以使测量范围达到0.01~48 mg/m3。采用PID参数的自校正调节,可以使测量曲线平稳地过渡到设定值。PID控制结果几乎没有超调,稳定时间短,在设定的目标角度值附近振荡少,有效抑制了调节传感器接收灵敏度时引起的振荡。
上一篇:基于GPRS传输的输电线路红外测温系统
下一篇:虚拟仪器技术在计量工作中的应用

