- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于C8051F340驱动与采集的CCD光电遥测垂线仪
录入:edatop.com 点击:
0 引言
垂线是观测大坝水平位移及挠度的一种简便有效的手段。随着技术的进步,遥测垂线坐标仪已由接触式发展到非接触式。
电荷耦合器件CCD(Charge Coupled Devices)是一种集光电转换、电荷存储、电荷转移为一体的传感器件。它的主要功能是把光学图像转换为电信号,即把入射到传感器光敏面上按空间分布的光强信息,转换为按时序串行输出的电信号——视频信号,能再现入射的光辐射信号。这里采用的是线阵CCD,它由光敏区阵列与移位寄存器扫描电路组成,特点是处理信息速度快,外围电路简单,易实现实时控制,广泛应用在非接触测量领域。
CCD的驱动方法很多,可以采用数字电路驱动、EPROM驱动程序、单片机驱动或可编程逻辑器件驱动等方法。通常采用CPLD产生高速脉冲序列驱动线阵CCD,典型的脉冲频率为1~10 MHz,外围电路相对复杂,而直接用单片机产生CCD驱动脉冲信号完全依赖程序指令的延时来实现,而目前的单片机时钟频率较低,因此由指令产生多路脉冲时,其最高频率不过几百赫兹,要达到兆赫级的CCD驱动频率则无能为力。本文提出了一种基于C8051F340单片机的CCD式遥测垂线仪驱动与采集系统的实现方法,利用此单片机的4倍时钟乘法器直接产生高速脉冲序列驱动线阵CCD,简化了外围电路,并对CCD输出信号在硬件上做了一定的处理,使得待检测脉冲信号易于检测,最后对平行光源做了非线性曲线修正,大大提高了仪器的观测精度。
1 C8051F340单片机简介
C8051F340单片机是高度集成的混合信号SoC(System on chip)系统级MCU芯片,具有与8051单片机兼容的高速CIP-51微控制器内核,与MCS-51指令集完全兼容。除了具有标准8051的数字外设部件外,片内还集成了数据采集和控制系统中常用的模拟部件及其他一些数字外设部件。其主要特点如下:
(1)高速、流水线结构的8051兼容的微控制器内核(可达48 MIPS),
(2)精确校准的12 MHz内部振荡器和4倍时钟乘法器,
(3)电源稳压器,
(4)64 KB的片内FLASH存储器,
(5)4 352 B片内RAM(256+4 KB),
(6)丰富的片上外设资源,包括4个通用16位定时器、2个增强型UART口、具有5个捕捉/比较模块和看门狗定时器功能的可编程计数器/定时器阵列(PCA)、2个电压比较器、10位ADC等,
(7)40个端口I/O(容许5 V输入)。
2 光学原理
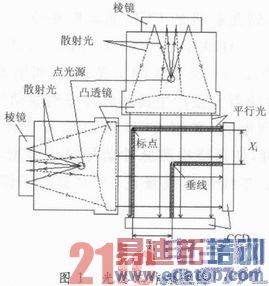
光路工作原理如图1所示,由点光源、棱镜、凸透镜、坝体标点、垂线、CCD等组成,由点光源发出的散射光,经棱镜折射到透镜,点光源和透镜的位置已计算好,散射光通过透镜后产生平行光,当垂线位于平行光中时,在CCD上产生与垂线线径同宽的阴影,读出光影的数字信号即可计算出垂线的相对坐标。为消除更换仪器或器件对观测数据连续性的影响,在坝体上设坝体标点,每次观测时分别测出坝体标点和垂线在CCD上的坐标,分别计算出Xi和Yi作为观测值。光路中采用凸透镜和棱镜配合,目的是为了减少光路所占用的空间,减小仪器体积。为减少环境光对检测的影响,点光源采用了单色光,在CCD表面设置了与光源光谱相应的滤光片,有效地滤掉了杂散光的影响,使仪器可在环境光较强的地方工作。
3 CCD驱动实现
仪器采用日本东芝公司的线阵CCD TCD1702C,其像素总数为7 500个单元,像敏单元长为7 μm、高为7 μm,中心距亦为7 μm。像敏区总长为52.5 mm。
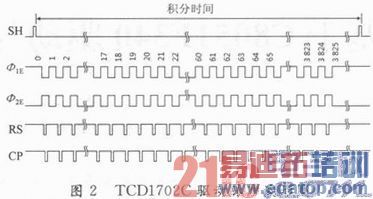
获取线阵CCD的二维图像,必须配以驱动脉冲序列。图2为TCD1702C的驱动脉冲波形图。它的驱动脉冲由5路脉冲构成,输出为2路与光强相关的模拟信号,一路为奇数单元的信号,另一路为偶数单元的信号。
TCD1702C是没有快门控制的CCD器件,在顺序读出的过程中光敏单元仍然对光敏感,在驱动脉冲频率允许的范围内,频率越高越能反应出光敏单元真实的光照情况,反之得到的是模糊的图像。利用单片机产生脉冲序列非常容易,但以往的单片机系统频率低,产生的脉冲序列频率远达不到1 MHz,所以环境光对其影响特别大,这也是通常要使用CPLD驱动CCD的原因。
C8051F340具有精确校准的最大12 MHz内部振荡器以及可外接最大12 MHz外部晶体振荡器,4倍时钟乘法器允许使用12 MHz振荡器产生48 MHz时钟,大大提高了指令执行速度。只要所选择的振荡器被使能并稳定运行,单片机的系统时钟可以在内部振荡器、外部振荡器和4倍时钟乘法器之间自由切换。在扫描CCD过程中,启用了单片机的4倍时钟乘法器,使脉冲序列的频率达到1 MHz以上,在扫描结束后关闭4倍时钟乘法器,以降低系统功耗。为提高脉冲序列的驱动能力,在单片机I/O端口与TCD1702C之间设置了CMOS反相器。这样大大减化了电路设计,降低了仪器成本,同时达到了降低环境光影响的效果。
4 CCD输出信号采集实现及数据处理
根据线阵CCD的检测原理,被检测对象的光信息通过光学成像系统成像于CCD的光敏面上,CCD的光敏像元将其上的光强度转换成电荷量。CCD在一定频率的时钟脉冲的驱动下,在CCD的输出端可以获得被测对象的视频信号。
在CCD输出端获得的视频信号幅值较小,为了便于CCD输出信号采集,对CCD输出信号做了一定的处理。CCD采集实现原理框图如图3所示。
TCD1702C输出信号经放大、整形处理后,得到比较直观且易于检测的脉冲信号,如图4所示。整形输出端连接至C8051F340单片机的外部中断端口。当扫描至阴影的边缘时发生中断,记录下扫描脉冲数,扫描结束后通过对这些边缘的计算可得到标点和垂线的坐标。

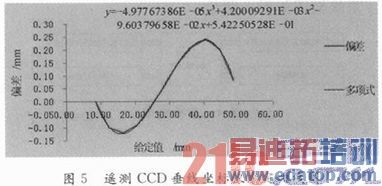
TCD1702C的线性度非常好,对大坝观测的精度要求来说其非线性影响可以忽略不计,平行光的质量是影响最大的。由于光路理论计算与实际安装存在误差,平行光源要做得非常理想是有一定难度的,为此针对所采用的光源及凸透镜对每台仪器分别整理出一条非线性修正曲线,并将修正参数固化于C8051F340单片机中,在仪器测量过程中自动调用固化参数参与计算,保证全量程观测值与给定位移的误差小于0.05 mm。表1为某一台遥测CCD垂线坐标仪率定实验数据。

图5是通过表1绘制出的遥测CCD垂线坐标仪率定曲线图。
通过表1,可以计算出非线性曲线修正前后仪器测量的偏差值,见表2。

通过表2可以看出,通过非线性曲线修正后,大大降低了光路安装带来的测值偏差,提高了仪器的测量精度。
为了智能化管理数据,在仪器上安装有定时数据存储模块,该模块配合自身带有的日历时钟模块,可将用户设置的定时观测所测数据存储在数据存储模块中,该模块是非易失性的E2PROM,可存储1 023次观测数据,可以满足大坝安全监测对数据存储的要求。
除了定时观测外,上位机可随时对仪器进行遥控观测。遥控观测通过485总线传输命令及数据,实时性比较强,可随时获得观测数据,以便于实时分析大坝变形状态。
5 结语
该产品目前已在国内多个水利水电工程大坝安全监测自动化系统中得到了成功的应用与推广,大大提高了大坝变形观测的工作效率、观测精度,降低了观测人员的工作强度,提高了运行管理单位的大坝安全监测自动化技术水平。

