- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于LabVIEW虚拟仪器技术的分布式速度检测系统
录入:edatop.com 点击:
0 引 言
在实际生产生活中,经常需要检测物体的运动速度。目前对一般常速运动物体的测速方式主要有2种:一种是测平均速度,如公路交通系统中通过相邻站点IC卡确定两个站点之间所用时间求得平均速度;一种是测即时速度,所用方法一般为多普勒雷达测速,即利用移动物体的多普勒效应实现测速。这些测速方法都有比较广泛的应用,但也有一些缺点,例如造价较高,或检测精度较低,尤其是不便于远程分布式监控。在此设计的以单片机和LabVIEW虚拟仪器技术为基础的分布式检测系统较好地解决了这些问题。
1 分布式速度检测系统的总体构成
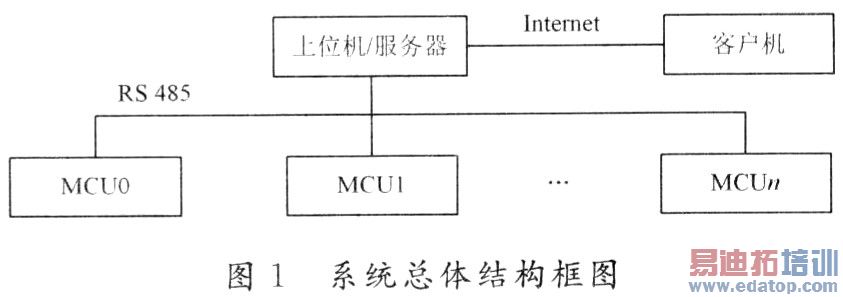
在此设计并实现的基于分布式汽车速度检测系统总体结构框图如图1所示。即以单片机作为测速数据采集电路的核心部件,通过RS 485总线接口把各测试点速度数据发送给计算机,利用LabVIEW软件编程实现各监控点车速数据的处理存储显示等功能。并以该计算机为服务器,利用LabVIEw中的Datasocket技术实现网络化的远程控制。计算机的串行口采用的是RS 232标准,若采用RS 485标准必须进行电平转换,该设计使用RS 232一RS 485转换器完成从RS 232到RS 485的电平转换。系统中51单片机芯片发出的串行数据为TTL电平,同时也只能接收TTL电平。在采用RS 485标准时,也必须进行电平转换。该设计中使用MAX485实现TTL与RS 485标准之间的相互转换
2 上位机编程实现
系统上位机程序均采用LabVIEW 7.1编程实现。LabVIEW是美国NI公司利用虚拟仪器技术开发的32位面向计算机测控领域的软件开发平台,具有直观易学,编程效率高的特点,且可以在多操作系统下运行。LabVIEW功能强大,日益被测控技术领域人员所关注。
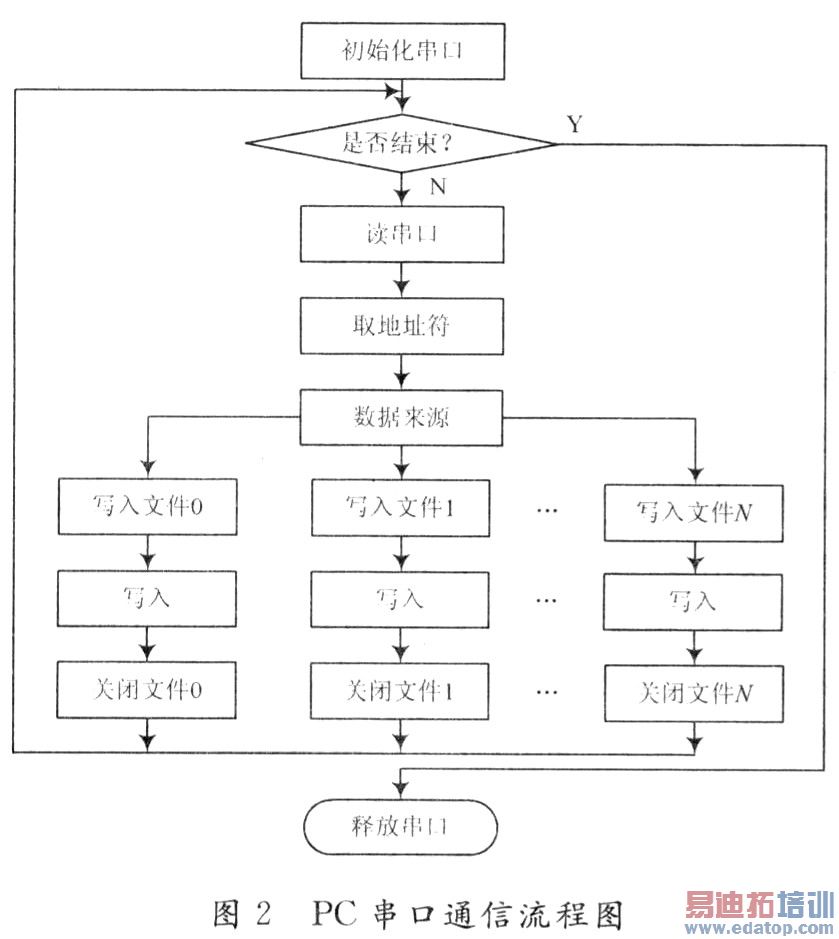
从功能上讲,上位机程序主要分为串口通信模块和网络通信模块。串口通信很简单,即在程序运行后按照既定通信协议判断接收到的信息属于哪个测试点,并将其存储到相应文本文件中,程序流程如图2所示。为提高系统速度,数据直接存储,不做实时显示。若要查看各检测点数据,可在菜单中选择触发速度数据显示。
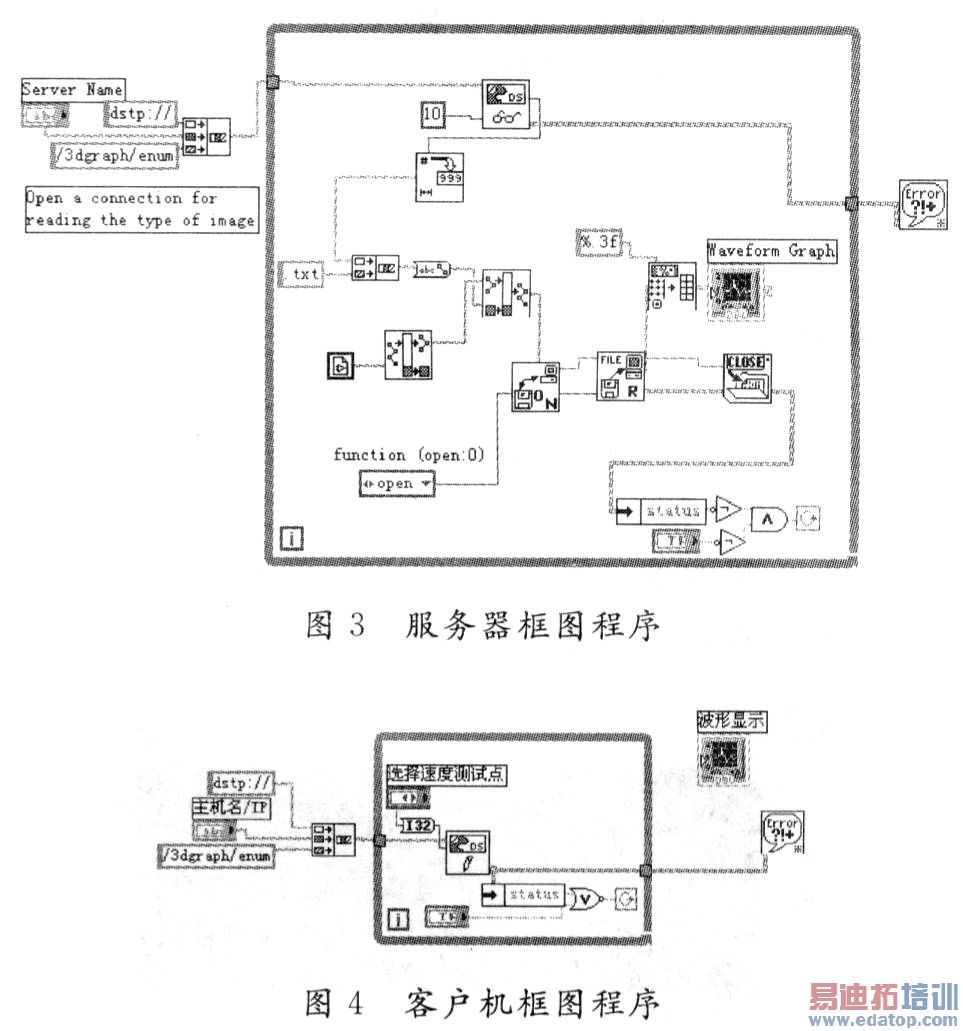
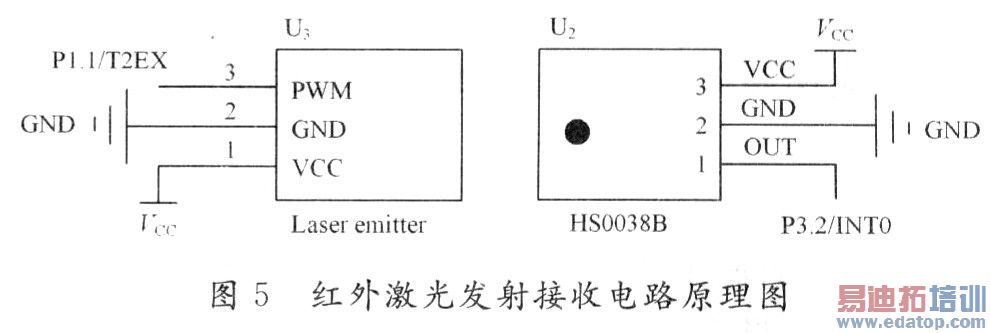
另外,为了方便对各点数据的远程网络监控,将负责接收速度数据的上位机作为服务器,使网络上的客户机可以远程查看测速数据。此即网络通信模块,通过使用LabVIEW 7.1中的Datasocket技术实现。远程监控的基本工作过程是:首先客户端选择要查看的测试点并发送给服务器端,服务器在接收到客户端准备查看的测试点代码信息后打开相应文件并将数据显示在一个waveform Graph控件中。由于在创建服务器端软件时,已对Waveform Graph控件的Datasocket connec-tion属性配置对话框做了设置,因此创建客户端软件不需要复杂的编程,只需要将服务器端waveform Graph控件复制到客户端程序中即可。考虑到该系统只是对速度数据的远程分享,所以在客户机程序中没做额外的编程。Datasocket:通信服务器端框图程序和客户机框图程序分别如图3,图4所示。
3 各测试点的速度检测
多普勒方式测速应用广泛,但技术较复杂,成本较高。而远距离测平均速度又使得所测速度过于模糊,限制了它的应用。因此在设计中另辟蹊径,以短距离内的平均速度近似作单点速度。即利用间隔一定距离s的2套红外线激光发射接收模块分别给单片机产生中断信号,由单片机对2次中断的时间差t进行计时,根据公式v=s/t即可获取速度值。距离s可以提前准确测量,而目前单片机的计时精度相当高,足以保证速度数据有很高的精确度。速度检测硬件电路主要包括电源、晶振、复位、显示、485收发电路及激光发射接收模块。其中485收发电路及激光发射接收模块是测速和通信的主要电路,下面分别做简要介绍。
激光发射接收模块由红外激光发射器件和探测器组成,它们分别被安放在待测物体两侧。当没有物体经过时探测器中有恒定的信号,不触发单片机中断。当有物体阻断其光路时产生有效信号进入单片机触发中断。设计中为了有效滤除杂散光影响,选用980 nm红外半导体激光器作为发光器件,并以单片机产生38 kHz的方波信号对其进行调制,接收电路则采用红外敏感的38 kHz专用光电探测器HS0038B。图5显示其中一路红外激光发射、接收信号处理电路原理图。
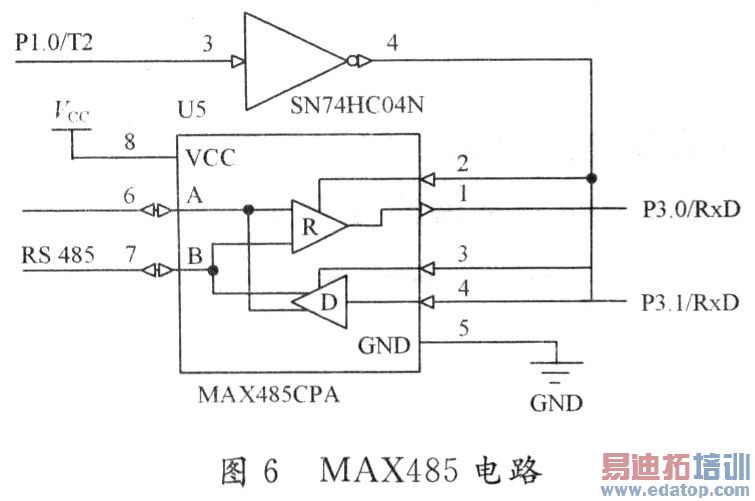
485收发电路模块的作用是实现单片机的TTL电平与RS 485标准之间的相互转换,采用MAX485芯片实现。MAX485芯片内部分别有收发两部分。图6为RS 485中A,B线与单片机连接的硬件电路原理图。
速度检测部分单片机程序主要有计时处理模块、测速处理模块和串行通信模块。模块化的编程方式使整个设计、调试非常简单。值得一提的是,考虑到具体的测试物体形状不一,还在程序中加了中断延时去抖程序,防止中断瞬间的多个尖峰波刺不断产生中断信号使单片机发生误触发操作。
4 实验结果
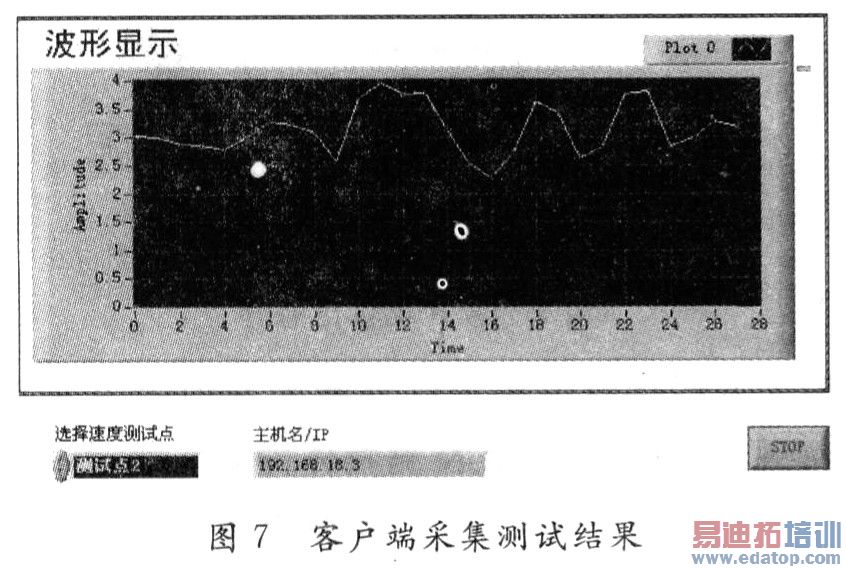
这里来用一辆速度可控的遥控模型车对该系统进行了测试,使其在一个封闭的跑道上变速行进,跑道中设置了5个观测点。图7为客户端采集到的第二个测试点的速度波形。试验显示,整个系统工作正常。
该系统采用LabVIEw软件平台配合简单外围硬件电路实现了分布式的速度采集、存储及远程监控显示等功能。系统充分借鉴虚拟仪器思想,采用常见器件,使系统整体造价低、测速精度较高、升级维护方便,具有良好的实用性。

