- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
船载雷达回程误差分析及消隙设计
录入:edatop.com 点击:
随着航天事业的飞速发展。现代航天任务对测控站测量系统的测量准确度提出了更高的要求。与陆地雷达伺服系统相比,测量船在海上受风浪影响而不停地运动,船载雷达随运动载体的运动也在不停地运动,为了进行精确定轨,测量精度尤为重要。一般都要求测角系统既有良好的跟踪性能,又要有尽可能高的测角精度。对直接影响跟踪系统精度和跟踪性能的重要部件,更要综合考虑,使整个系统性能达到最优。
影响雷达测角精度的因素比较多,误差的产生部位和性质也不尽相同。其中,回程误差是影响测角精度的一个重要因素。由于天线经常工作在零速附近,传动链中齿隙的存在会使得传动产生相应滞后,甚至会产生极限环振荡,在动力传动链中,传统的机械消隙已经无法满足精度要求,本文提出了双马达驱动电消隙技术,它具有更多优越性。
1 回程误差分析
1.1 回程误差的概念
如果传动装置的组成零部件制造、装配得绝对准确,对使用过程中的温度变形、弹性交形也予以忽略,则传动过程小,输出轴转角φo与输入轴转角φi之间应符合下列理想关系:
式中,it为传动装置的总传动比。φo和φi之间成线性比例关系。
实际上,组成零部件不可能制造、装配得绝对淮确,而在使用过程中还会存在温度变形和弹性变形,因此,在传动过程个输出轴的转角总会存在误差。
回程误差可以定义为:当输入轴开始反向回转后到输出轴也跟着反向时,输出轴在转角上的滞后量,用符号△R表示。由于回程误差的存在,反向回转后,输出轴的φo和输入轴的φi之间的关系曲线如图1所示,它与电工学中的磁滞回线十分相似。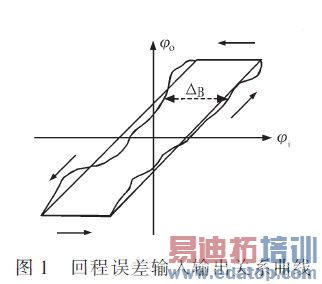
回程误差也称为空程误差,相似含义的名称还有齿隙、侧隙、空回、死程等。可以作如下设想:使输入轴固定不动,然后在正反两个极限位置上旋转输出轴,这时输出轴所具有的游移量即该传动装置在输出轴上的回程误差。也可以使输出轴固定不动,然后在正反两个极限位置上旋转输入轴,这时输入轴所具有的游移量即该传动装置在输入轴上的回程误差。回程误差的静态测量就是按上述方法来进行的。
1.2 回程误差对伺服系统性能的影响
传动链的回程误差对伺服系统性能的影响,按其在系统中所处位置不同而有所不同。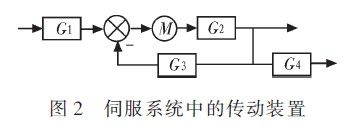
如图2所示,对处于闭环前的传动链G1,其回程误差将影响伺服精度;对处于闭环内前向通路上的传动链G2,其回程误并不影响伺服精度,但对稳定性有重大的影响;对处于闭环内反馈回路上的传动链G3,其回程误差对伺服精度及稳定性均有影响;对处于闭环后的传动链G4,其回程误差影响数据的传递精度。
1. 3 回程误差分析
传动链的回差是各个齿轮副上回差的综合,而各个齿轮副上的回差则是每个齿轮上的回差以及箱体孔中心距误差的综合。每个齿轮上的回差则是齿轮本身、轴、轴承等零部件在制造、装配时的误差综合。考虑回程误差因素时一般折算到节圆切向上来综合,即对切向齿隙进行分析和综合。影响齿轮切向齿隙的因素主要有以下几个方面。
1)每个齿轮轮齿的减薄量及其误差。为了补偿制造、装配时的误差,补偿温度变形、弹性交形,避免轮齿卡死,同时也为了贮存润滑剂,改善齿面的摩擦条件,在轮齿的非工作侧面必须保持一定的间隙。
2)轴承的游隙。理想情况下,与齿轮轴配合的轴承内环与箱体孔配合的轴承外环同心。实际上啮合力将使轴的位置沿着啮合力的方向紧靠外环,当反向驱动时,啮合力又使轴在反向的啮合力方向上紧靠外环。齿轮在切向和径向偏移,将产生一个小角度的转动,此角度即为由轴承游隙产生的回差。
3)除了上述因素外,影响齿隙的误差因素还有齿轮内孔与轴的配合间隙、轴的偏心、箱体的孔中心距偏差、轴承的内环偏心、外环偏心等。
2 减小回程误差的措施
减小回程误差、提高传动精度的措施主要可以分成两方面:结构措施和电路措施。
2.1 结构措施
2.1.1 合理设计传动链
适当地提高零部件本身的精度,合理地设计传动链,可以减少零部件制造、装配误差对回差的影响。
1)合理选择传动型式。一般来说,圆柱直齿与斜齿齿轮机构的经济精度较高,蜗杆蜗轮机构次之,圆锥齿轮则更次之。在行星齿轮机构方面,谐波齿轮精度最高,渐开线行星齿轮机构、少齿差行星齿轮机构次之,摆线针轮行星齿轮机构则更次之。
2)合理确定级数和分配各级传动比。减少传动级数,就可减少零件数量,也就减少了产生误差的来源。对于雷达减速传动链,各级传动链从高速级开始,逐级递增,且在结构空间允许的前提下,尽量提高末级传动比。采用大的传动比,可使从动轮半径增大,从而提高了角值精度。
3)合理布置传动链。在减速传动中,精度较低的传动机构(如圆锥齿轮机构、蜗杆蜗轮机构)适宜布置在高速轴上,这样可减小低速轴上的误差。
2.1.2 采用消隙机构
消隙机构的型式很多,下面简单介绍3种。
1)中心距可调消隙机构 在装配时根据啮合情况调整中心距,以达到减小齿隙的目的。对于减速轮系,最后一级的齿轮副对回差的影响最大,因此将最后一级齿轮副设计成中心距可调,最为有利。
2)弹簧加栽浮动齿轮消除机构 这种方法是依靠弹簧加载,使齿与齿紧密啮合而达到消除的目的。
3)双传动链弹簧加栽消隙机构 它有两台伺服电机,各自通过一套齿轮箱后驱功末级大齿轮。这两台伺服电机的激磁绕组是串联的,以使它们的激磁电流和转矩常数相同。电机的后伸轴分别通过一对锥齿轮与预载扭簧相连,预载扭簧给传动系统中的齿轮加了一个偏置转矩,从而消除了齿隙。
2.2 电路措施
这种消隙方法是用两个相同的传动链连接两个伺服电机到末级大齿轮,这两个电机分别加电控制:低负载力距时,在这两个电机之间建立一个偏置电压或偏置电流,从而得到一个偏置转矩,消除齿隙;而高负载力矩时,偏置转矩自行取消,负载力矩由两个电机分担。采用双传动链电消隙机构可以显著减小回程误差。
3 电消隙设计
3.1 力矩偏置电路
在电消隙机构中,两个伺服电机分别由两套可控硅功率放大器控制。相对功率放大器来讲,假定1#马达电枢正接,2#马达电枢反接。1#马达和2#马过中的电流都可分为两部份Id和I偏,Id是马达驱动负载的电流,但必须Id1和Id2方向相反才能驱动负载运动;I偏是用于电消隙的偏置电流,I偏1和I偏2必须大小相等,方向相同才能产生大小相等方向对顶的偏置力矩。
根据电流指令控制要求设计产生偏置电流指令信号的电路,简称为力矩偏置电路。利用两个电流环的负载电流指令提取Id1和Id2信号,通过偏置电路去控制偏置电流指令的形状,可以使偏置电路成为一种函数发生器,使偏置电流指令成为负载电流的函数。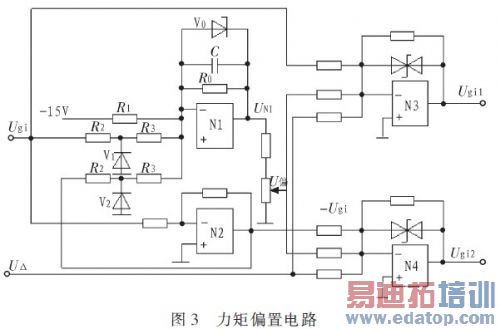
图3是力矩偏置电路图,Ugi为速度调节器输出的负载电流指令,U偏是偏置电流指令,U△是差速振荡抑制电流指令;N1为梯形函数发生器。调整电位器可以调整偏置力矩的大小。
3.2 消隙实现
如果不考虑抑制差速振荡的马达力矩,则两个马达的力矩M1和M2与负载电流指令的关系如图4所示。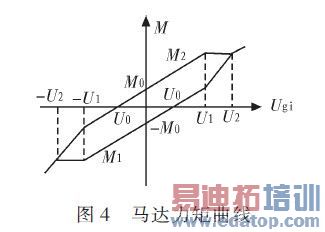
图4中,Ugi为速度调节器输出的负载电流指令。
当Ugi=0时,M2=-M1=M0,M0称为偏置力矩值。
当Ugi由0正向增加不太大时,保持M1、M2反向,仍能消隙,此时由2#马达拖动负载和1#马达前进。
当Ugi正向增加到U0时,M1=0,1#马达在齿隙中游移。但2#马达仍拖动负载,其齿轮箱不会出现齿隙,负载不会游移。
当Ugi>U0时,1#马达穿过齿隙与2#马达共同推动负载,但M2>M1。
当Ugi≥U1时,偏置力矩开始减小。
当Ugi≥U2时,偏置力矩完全消隙,两台马达以相等的力矩推动负载。
可以看出,在一般工作情况下,负载至少和一个马达之间无齿隙,不会游移。但是,当力矩快速反向而且其值又比较大时,仍有可能产生两个马达同时穿过齿隙的情况,但这种情况在实际使用时并不多。
4 结束语
双马达电消隙系统应用于船载雷达,经实践检验效果良好。采用雷达跟踪信标球方式进行测角精度统计,其结果如表1所示。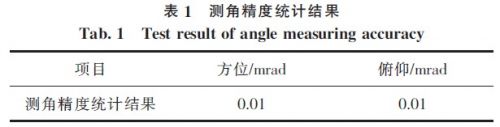
由上表可以看出,方位和俯仰测角随机误差满足0.2 mrad的指标要求,大大提高了船载雷达的测量精度。
在精密雷达天线驱动系统中,双马达或多马达驱动除了能实现电消隙、提高测角精度之外,在传递同样力矩的前提下,双马达驱动比单马达驱动所用的齿轮箱体积小,重量轻,易于加工制造;也就是说,在齿轮箱总体积相同的情况下,双马达驱动能提高传动链的刚度。
上一篇:基于嵌入式系统的虚拟仪器设计
下一篇:BP神经网络的电路最优测试集的生成设计

