- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
海洋维权执法浮标信息采集系统的CAN总线设计
录入:edatop.com 点击:
我国的海上疆土非常的辽阔,海洋开发和海洋探测对于我国经济的发展具有深远的意义。海洋资料浮标是海洋环境监测与海洋灾害预报的主要手段之一,具有全天候、长期连续、定点监测的特点。根据海洋维权执法浮标的特点,运用现场总线技术,设计了基于CAN总线的浮标数据采集系统。实验表明,CAN总线的应用为海洋维权执法浮标采集系统提供了一种新的采集方式,组成了一套总线化、模块化、高可维护性的系统。
海洋维权执法浮标基于目前的大型海洋资料型浮标安装高清晰度图像采集系统和声学传感器阵列,定点获取关键海域的舰船信息,获取海洋侵权目标、提升全天候探测能力;分别研制基于浮标卫星和飞机卫星的高速数据实时传输系统,结合目标特征数据库,实现对侵权目标的特征识别和研判;综合集成上述传输技术、探测技术和分析研判技术等,在东海特定敏感区域开展维权执法目标探测识别与信息传输技术集成三位一体的信息综合监视示范应用。
但是,我国目前的海洋资料浮标信息采集系统仍存有许多不足之处:浮标信息采集系统实现对浮标内信息的集成,完成浮标上图像信息、水声信息、水文环境参数信息、浮标体安全参数信息的采集、存储和传输。数据采集处理系统种类多,给使用和维护带来了极大的不便。因此为克服传统浮标采集系统的不足,本文将CAN总线应于海洋维权浮标采集系统,主机和通讯机通过CAN总线相连,CAN总线数据通信具有可靠性、实性及灵活性的特点,因此解决了大型海洋浮标数据采集系统的扩展性差的缺点。浮标系统电气部分分为:电源系统、浮标信息采集系统、水下声阵列信息采集与识别系统、高清图像采集与识别系统、高速卫星通信系统、水文气象传感器和浮标体安全监控传感器。
1 CAN总线原理
CAN(Controller Area Network)是一种用于实时应用的串行通信协议总线,是应用最广泛的现场总线之一。CAN协议是在1986年由德国BO SCH公司开发的,由于其实时性、高性能、高可靠性等优点,随后也广泛应用于其他领域,如多种控制设备、交通工具、工业自动化、医疗仪器以及建筑、环境控制等。CAN总线的通信介质可以是双绞线,光导纤维或者同轴电缆,传输速率可达1 Mb/s,传输距离可达10 km.其特点概括如下:
(1)多主控制。在总线空闲时,所有与总线相连的单元都可以向其他节点发送信息。
(2)自动关闭。CAN总线可以判断出总线上错误的类型是暂时的数据错误(如外部噪声等)还是持续的数据错误(如驱动器故障、单元内部故障、断线等)。
(3)远程数据请求。CAN总线可以通过发送“远程帧”,请求其他节点的数据。高效的短帧结构。每个数据帧数据域最长为8 B,传送短报文时效率高,高可靠性。
(4)非破坏性总线仲裁技术。具有点对点、一点对多点及全局广播等多种传输方式。当有多个节点一起向总线发送信息时,最高优先级的节点可以继续传输数据而不受影响,优先级低的节点会主动的退出发送。
(5)总线配置灵活。
2 CAN总线的设计
(1)硬件的设计。基于CAN总线设计的硬件从结构上分为主机模块和通信机模块,模块之间通过CAN总线进行数据的通信。主机将采集的水文气象数据和浮标体安全监控数据通过CAN总线周期性的上传,通讯板将来自岸站的配置和控制命令也是通过CAN总线下发。具体的系统结构图如图1所示。

通讯板用于处理图像信息、水声信息和高速卫星通信的信息。浮标通讯板是整个系统的控制枢纽,从通讯板的结构上可以可看出其功能。通讯机来控制底板上主机电源的通断是通过电源控制接口实现的。为了实现系统的即插即用提供软件支持因而选用即插即用接口。通过海事卫星的网络接口,采集的图像和水声信息通过通讯机发送到岸站。通讯板是数据通信最前端的部分,是浮标信息采集系统中非常重要的。
主机通过各种传感器将在一个周期内(通常是半个小时)采集各种数据,然后按照一定的格式存储到SD卡中。通讯机通过CAN总线发送数据收集命令,主机在规定的时刻接收命名,将采集并经过统计的数据通过CAN总线上传到通讯板。主机上装有各种舱体状态检测传感器如舱温传感器、水警传感器、门警传感器,采集的水文气象数据会和舱温异常、舱门被非法打开等舱体异常信息一起通过CAN总线上传给通讯板,再通过卫星发送给岸站,实现浮标采集数据的实时显示、存储和转发功能。
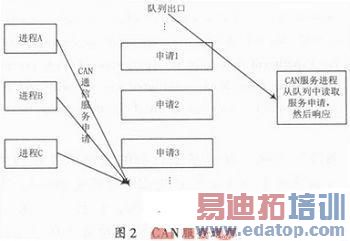
(2)软件的设计。主机和通讯机通过CAN总线相连,作为整个浮标信息采集系统通信的通道。STM32F207内置CAN 2.0接口,支持CAN 2.0B协议,该协议符合国际标准。浮标系统的CAN通信帧采用的是扩展帧格式。考虑系统的通信过程都是突发式的,除了通道标定。不论主机还是通讯机,在将通道标定作为一个独立的模式后,CAN相关功能都设计做服务性的独立进程,CAN通信的服务请求都汇聚到一个消息队列中,都是以消息的形式,最后通过一个统一的进程接收处理。在这种工作机制下,一般情况下,通讯机通过CAN总线发送给主机的第一帧数据,不能被主机可靠地接收。因此,每次通信开始先要建立可靠的通信链路使主机做好准备。建立连接后,通讯机就可以发送命令,要求主机上传数据。通讯机发送完命令后,再发送删除连接帧,这样就完成了一次完整的通信。CAN服务进程如图2所示。
3结论
在此完成了CAN功能进程的设计与实现。系统安装了水文气象传感器及浮标体安全监控传感器等。基于海洋浮标低功耗及安全性的要求,系统由值守节点负责控制启动。
4结语
本文创新地将CAN总线技术应用于海洋维权执法浮标信息采集系统中。通过CAN总线将主板和通讯板相连,并对软件和硬件进行了设计及测试。实验证明这种对数据的实时采集与传送系统,提高了系统的可靠性,也具有实时性强、纠错能力强等特点,该系统的研制成功具有较高的实际应用意义。

