- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于CMOS摄像头和平行激光束测距系统设计
录入:edatop.com 点击:
监测对象的当前空间位置是最基本的信息之一,往往可以借助传感器来获得,其实质可以理解为对监测位置空间距离的测量。有关距离的测量方法有很多,在航空航天领域,传统的接触式传感器由于受体积、质量、安装条件以及结构等因素限制逐渐被非接触测量方式所取代。其中,基于数字图像的测量方法由于具有速度快、信息量丰富、对被测对象的影响小等特点而受到广泛的关注。利用摄像头随着距离增加物体图像越小的原理,采集目标图像信息,并进行数据处理,从而获得目标点的距离。
1 非接触测距系统简介
现代的非接触式测距一般分为:1)超声波测距;2)红外测距;3)激光测距。而超声波测距和红外测距一般测量距离较近并且误差较大,方向性差,抗干扰能力不强,并且超声波测距不能用于真空环境。激光测距虽然能测量的距离较远,并且达到了较高精度。然而,激光测距仪的技术过于复杂,制造的难度较大,成本较高,远距离测距时要求的激光管功率较大,而且光学系统需要保持干净,以免影响测量。
本文提出了距离的一种非接触测量方法。以数码摄像头捕获的可变距平行激光束光斑图像作为信息载体,利用图像的预处理、阈值分割以及特征提取等相关的数字图像处理方法,在一定的范围内实现任意位移的高精度测量。
2 测距系统原理
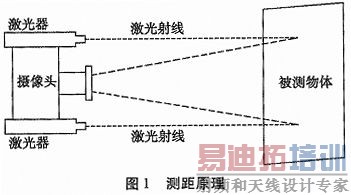
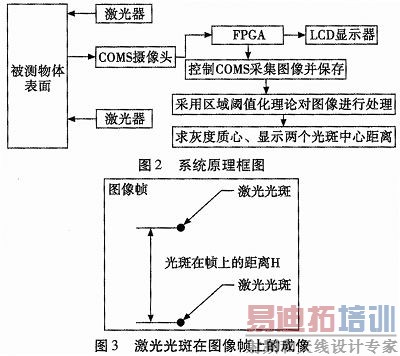
本文的测距原理如图1,将两个激光器分别装在摄像头的两侧,并且将两束激光调节为相互平行,当两束激光照射到被测物体上,摄像头采集照射到物体上的两个激光点如图3,根据物体离摄像头远就成像小,物体距离摄像头近,成像大的原理。计算在图像帧上的光斑距离就可以得到物体的距离信息。
3 测距系统分析
采用COMS摄像头,它与CCD摄像头相比,具有生产成本低、抗干扰能力强、响应速度快等优点。固定摄像头和激光器时,要保证两个激光器的中心线和COMS摄像头的中心线在同一个竖直平面内,激光光线和摄像头成像轴完全平行,两个激光器中心线距离为H,并且可以通过改变两个激光器中心线距离,增大系统的测量范围。COMS摄像头连接到FPGA上,采用FPGA进行图像处理,利用图像预处理方法对图像进行滤波、阈值分割,能有效去除噪声对图像的影响。再通过灰度质心算法对图像进行细分,通过高斯拟合可以将光斑中心的计算精度提高,计算出两个光斑中心点的距离h’,并且根据分辨率等参数得出竖直方向整个图像帧的上下距离h。COMS摄像头的光敏面竖直高度为y,激光束中心在光敏面上成像点的距离为y’。采集到图像帧时焦距为f,被测物体离COMS摄像头距离为L。
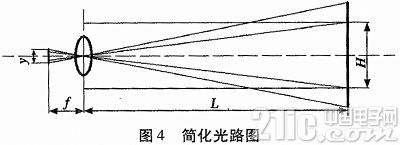
根据简化光路图可得:

根据成像原理
有对应关系,所以距离L与两个光斑中心点的距离h’有对应关系。在实际情况中,先对COMS摄像头的测距结果进行曲线标定,使用Matlab整合出两个光斑中心点的距离h’和距离L关系曲线,最终能够通过COMS摄像头和平行激光束进行测距。与单点激光CCD镜头三角测距相比,随着距离的增大,光斑中心点的距离变化更明显,分辨率更高。
通过提高摄像头的像素数和减小激光束发出光斑,可以提高图像在每一帧上的精度,从而提高了测量精度。当测量距离较远时,通过调节两束激光之间的距离可以提高摄像头对两个光斑的识别能力,从而可以提高设备的测距范围,能够更好地应用到实际当中。
4 小结
基于CMOS摄像头和平行激光束测距系统设计,相对于单激光束三角测距测量距离更远,精度更高。当测量距离较远时,该系统可以通过调节两束激光之间的距离提高摄像头对两个光斑的识别能力,从而可以提高设备的测距范围。该测距系统成本低,携带方便。随着COMS摄像头性能和FPGA图像处理能力不断提高,未来会有更好的应用前景。
上一篇:基于单片机的车载加速度测试系统的设计
下一篇:基于单片机的散体流量计的设计与开发

