- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
GPS技术基础及GPS接收器测试(下)
录入:edatop.com 点击:
多组卫星的GPS接收器测量
灵敏度测量需要单一卫星激发,而有多项接收器测量需要可仿真多组卫星的单一测试激发。更进一步来说,如首次定位时间(TTFF)、定位精确度,与精确度降低(Dilution of precision)的测量作业,均需要接收器进行定位。由于接收器需要至少4组卫星进行3D定位作业,因此这些测量将较灵敏度测量来得耗时。也因此,多项定位测量作业均于检验与校准作业中进行,而非生产测试时才执行。
此章节将说明可为接收器提供多组卫星信号的方法。在讨论GPS仿真作业时,亦将让使用者了解TTFF与定位精确度测量的执行方法。若是讨论RF记录与播放作业,将一并说明应如何在多项环境条件下,校准接收器的效能。
测量首次定位时间(TTFF)与定位精确度
首次定位时间(TTFF)与定位精确度测量,为设计GPS接收器的首要检验作业。若您已将多种消费性的GPS应用了然于胸,即应知道接收器回传其实际位置所需的时间,将大幅影响接收器的用途。此外,接收器回报其位置的精确度亦甚为重要。
为了让接收器可进行定位,则应透过导航讯息(Navigation message)下载星历与年历信息。由于接收器下载完整GPS框架必须耗费30秒,因此“冷启动(Cold start)”的TTFF状态则需要30~60秒。事实上,多款接收器可指定数种TTFF状态。最常见的为:
冷启动(Cold Start):接收器必须下载年历与星历信息,才能进行定位。由于必须从各组卫星下载至少1组GPS框架(Frame),因此大多数的接收器在冷启动状态下,将于30~60秒时进行定位。
热启动(Warm Start):接收器的年历信息尚未超过1个星期,且不需要其他星历信息。一般来说,此接收器可于20秒内得知目前时间,并可进行100公里内的定位[2].大多数热启动状态的GPS接收器,可于60秒内进行定位,有时甚至仅需更短的时间。
热开机(Hot Start):接收器具备最新的年历与星历信息时,即为热开机状态。接收器仅需取得各组卫星的时序信息,即可开始回传定位位置。大多数热开机状态的GPS接收器,仅需0.5~20秒即可开始定位作业。
在大部分的情况下,TTFF与定位精确度均与特定功率强度相关。值得注意的是,若能于多种情况下检验此2种规格的精确度,其实极具有其信息价值。因为GPS卫星每12个小时即绕行地球1圈,所以可用范围内的卫星信号随时都在变化,也让接收器可在不同的状态下回传正确结果。
下列章节将说明应如何使用2笔数据源,以执行TTFF与定位精确度的测量,包含:
1)接收器在其布署环境中,透过天线所获得的实时数据
2)透过空中传递所记录的RF信号,并将之用以测试接收器所记录的数据
3)当记录实时数据后,RF产生器用于模拟星期时间(Time-of-week,TOW)所得的仿真数据用此3笔不同的数据源测试接收器,可让各个数据源的测量作业均具备可重复特性,且均相互具备相关性。
测量设定
若要获得最佳结果,则所选择的记录位置,应让卫星不致受到周遭建筑物的阻碍。我们选择6层楼停车场的顶楼进行测试,以无建物覆盖的屋顶尽可能接触多组卫星信号。透过GPS芯片组的多个开机模式,均可执行TTFF测量作业。以SIRFstarIII芯片组为例,即可重设接收器的出厂、冷启动、热启动,与热开机模式。下方所示即为接收器执行相关测试的结果。
若要测量水平定位的精确度,则必须根据经、纬度信息进而了解相关错误。由于这些指数均以“度”表示,因此可透过下列等式转换之:
等式16.计算GPS的定位错误
请注意该等式中的111,325公尺(111.325公里),即等于地球圆周的1度(共360度)。此指数是根据地球圆周360x111.325km=40.077km而来。
Off-The-Air GPS
以“Off-the-air”方式测量接收器的TTFF时,即是将接收器直接连至天线达到最不精确的方式。由于此测量作业可针对已记录与仿真的GPS信号,进而校准自动化测量作业,因此亦具有一定的重要性。除此之外,亦可针对SIRFstarIII芯片组进行程序设计,让接收器进入冷启动模式,且以接收器所得到的TTFF值进行所有测量作业。请注意,GPS接收器一般指定为32.6秒的冷启动TTFF时间。在我们的测量作业中,则得到下列结果:
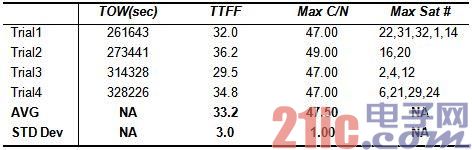
图19.“Off-the-air”GPS信号的TTFF与最大C/N比值
根据初始的“Off-the-air”结果,则可发现GPS接收器在标准的3秒误差内,可达到33.2秒的TTFF.这些测量结果均位于TTFF规格的容错范围内。而更重要的,即是可透过仿真与记录的GPS数据,进而比较测量结果与实际结果。
根据上列线性误差等式,即可计算各次测量的线性标准误差。

图20.由“Off-the-air”GPS信号所得的LLA
请注意,若要将“Off-the-air”GPS信号、仿真信号,与播放信号进行相关,则必须先进行“Off-the-air”信号功率的相关性。当进行TTFF与定位精确度测量时,RF功率强度基本上不太会影响到结果。因此,必须比对“Off-the-air”、仿真,与记录GPS信号的C/N比值,即可进行RF功率的相关性作业。
已记录的GPS信号
虽然可透过实时信号测量TTFF与定位误差,但是这些测量作业往往不可重复;如同卫星均持续环绕地球运行,而非固定不动。进行可重复TTFF与定位精确度的测量方式之一,即是使用已记录的GPS信号。此章节将接着说明应如何透过已记录的GPS信号,以进行实时GPS信号的相关作业。
已记录的GPS信号,可透过RF矢量信号发生器再次产生。由于必须播放信号,则校准RF功率强度最简单的方法,即是比对实时与记录的C/N值。当获得“Off-the-air”信号时,则可发现所有实时信号的C/N峰值均约为47~49dB-Hz之间。
而播放信号的功率强度,亦可达到与实时信号相同的C/N值,进而确定其所得的TTFF与位置精确度,将可与实时信号产生相关。在下图21中,我们使用的星期时间(TOW)值与实时“Off-the-air”信号的TOW相近,而在4次不同的实验下得到TTFF结果。

图21.由“Off-the-air”GPS信号所得的TTFF
除了测量首次定位时间之外,亦可测量GPS接收器所取得的经度、纬度,与高度信息。下图显示相关结果。
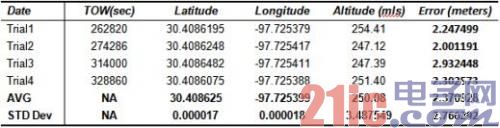
图22.由“Off-the-air”GPS信号所得的LLA
从图21与22中可注意到,其实透过已记录的GPS信号,即可得到合理的可重复TTFF与LLA(Latitude、Longitude、Altitude)结果。然而,由于这些测量作业的错误与标准误差,仅稍微高于“Off-the-air”测量的误差,因此几乎可将之忽略。因为绝对精确度(Absolute accuracy)较高,所以可重复性亦较优于“Off-the-air”测量作业。
仿真的GPS信号
最后1种可进行TTFF与定位精确度测量的GPS测试信号来源,即为仿真的多组卫星GPS信号。透过NILabVIEWGPS工具组,即可透过由使用者定义的TOW、星期数,与接收器位置,仿真最多12组卫星。此GPS信号仿真方式的主要优点,即是透过可能的最佳讯噪比(SNR)构成GPS信号。与实时/记录的GPS信号不同,依此种方法所建立的可重复信号,其噪声功率甚小。图23即呈现了仿真多组卫星信号的频域。
VSA设定
Center:1.57542GHZz
Span:4MHz
RBW:100Hz
Averaging:RMS,20Average

图23.仿真多组卫星GPS信号的带内功率(Power-in-band)测量作业
当透过仿真的多组卫星波形测试接收器时,则可针对接收器所提供的C/N比值进行关联,以再次评估所需的RF功率。
一旦能为RF功率强度进行关联,则可接着测量TTFF.当测量TTFF时,应先启动RF矢量信号发生器。过了5秒钟之后,可手动将接收器转为“冷”开机模式。一旦接收器取得定位信息,则将回报TTFF信息。下图则呈现仿真GPS信号的相关结果:
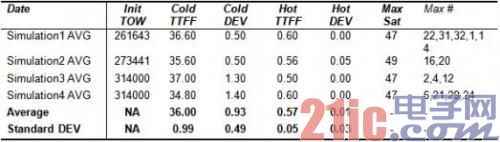
图24.TTFF数值的4项专属模拟
请注意图24中的所有仿真作业均使用相同的LLA(Latitudes、Longitude,与Altitude)。
此外,若要测量TTFF,我们亦可依不同的TOW建立仿真作业,以计算LLA的精确度与可重复性。请注意,由于在数个小时之内,可用的卫星信号将持续变化,因此必须设定多种TOW以测试精确度(如图24)。而图25则表示其LLA信息。

图25.多项TOW仿真作业的水平精确度
在图25中,可根据模拟的定位,计算出公尺为单位的水平错误。又如图20所示,可透过下列等式找出错误:
等式17.仿真GPS信号的定位错误
而针对我们所使用的接收器而言,其水平定位最大误差为5.2公尺,水平定位平均误差为1.5公尺。而透过图18所示,我们所使用的接收器均可达指定的限制之内。
如先前所述,接收器的精确度,与可用的卫星信号密不可分。也就是说,接收器的精确度可能在数个小时内大幅变化(卫星信号改变),但是其可重复性却极小。为了确认我们的GPS接收器亦为如此,则可针对特定的模拟GPS波形执行多项测试。此项作业主要是必须确认,RF仪控并不会对仿真的GPS信号产生额外的不确定性。如下方图26所示,当重复使用相同的二进制档案时,我们所使用的GPS接收器将得到极高可重复性的测量。
图26.相同波形的各次测试,其误差亦具有极高的可重复性
回头再看图20,使用仿真GPS信号的最大优点之一,即是可达到可重复的定位结果。由于此特性可让我们确认:所回报的定位信息,并不会因为设计迭代(Iteration)而发生变化,因此在开发的设计检验阶段中,此特性格外重要。
测量动态定位精确度
GPS接收器测试的最后1种方法,即是测量接收器的追踪功能,使其在大范围的功率强度与速度中维持定位。在过去,此种测试(往往亦为功能测试)的常见方法之一,即是整合驱动测试与多路径衰减(Multi-path fading)模拟。在驱动测试(Drive test)中,我们使用可导入大量信号减损(Impairment)的已知路径,驱动原型接收器。由于驱动测试是将自然减损套用至GPS卫星信号的简单方法,因此这些测量往往亦不可重复。事实上,如GPS卫星移动、天气条件的变化,甚至年度时间(Time of year)的因素,均可影响接收器的效能。
因此,目前有1种逐渐普及的方法,即是于驱动测试上记录GPS信号,以大量信号减损检验接收器效能。若要进一步了解设定GPS记录系统的方法,请参阅前述章节。而在驱动测试方案中,有多款PXI机箱可供选择。最简单的方式,即是使用DC机箱并以汽车电池进行供电。其次可使用标准的AC机箱,搭配转换器即可使用汽车电池供电。在此2种选项中,DC机箱的耗电量较低,但亦较难以于实验室中供电。如下列所示的标准AC机箱使用结果,其所供电的系统则包含1组外接的车用电池,与1组DCtoAC转换器。
一旦我们完成GPS信号的记录作业,即可透过相同的测试数据重复测试接收器。在下方的说明中,我们追踪接收器的经度、纬度,与速度。透过串行端口与每秒1次的NMEA-183指令读取速率,从接收器读取所需的数据。在下方测量中,我们所呈现的接收器特性参数,仅有定位与卫星C/N值。请注意,在执行这些测量作业的同时,亦可分析其他信息。虽然下列结果中并未测量水平精确度衰减(Horizontal dilution of precision,HDOP),但此特性参数亦可提供大量的接收器定位精确度信息。
若要获得最佳结果,则应确实同步化接收器与RF产生作业的指令接口。下方所示结果中,我们将COM埠(pin2)的数据信道做为开始触发器,以针对RF矢量信号发生器与GPS模块进行同步化。此同步化方式仅需任意波形产生器的1个频率循环(100MS/s),即可进行矢量信号发生器与GPS接收器的同步化。因此最大的歪曲(Skew)应为10μS.并请注意,因为我们将取得接收器的经纬度,所以由同步化作业所造成的精确度错误,将为10μs乘以MaxVelocity(m/s),或为0.15mm.
使用上述的设定,我们即可按时取得接收器的经纬度。结果即如下图所示:

图27与28.每4分钟所得到的接收器经纬度
在图27与28所呈现的数据中,即使用已记录的驱动测试信号,取得统计、定位,与速度的相关信息。此外我们可观察到,在每次的测试之间,此项信息具有相对的可重复性;即为每个独立轨迹所呈现的差异。事实上,这就是我们最需要的接收器可重复性(Repeatability)。由于可重复性信息将可预估GPS接收器精确度的变化情形,因此我们亦可计算波形各个样本之间的标准误差。在图29中,我们在各次同步化取样作业之间,绘出标准的定位误差(相对于平均位置)。

图29.依时间取得的经度与纬度标准误差
当看到水平标准误差时,可注意到标准误差在120秒时快速增加。为了进一步了解此现象,我们亦根据接收器的速度(m/s)与C/N值的Proxy,绘出总水平标准误差。而我们预先假设:在没有高功率卫星的条件下,卫星的C/N比值仅将影响接收器。因此,我们针对接收器所回传4组最高高度的卫星,平均其C/N比值而绘出另1组C/N的Proxy.结果即如下列图30所示。

图30.定位精确度与C/N值的相关性
如图30所示,在120秒时所发生的峰值水平错误(标准误差中),即与卫星的C/N值产生直接关联,而与接收器的速度无关。此次取样的标准误差约为2公尺,且已低于其他取样约10公尺的误差。同时,我们可发现前4名的C/N平均值,由将近45dB-Hz骤降至41dB-Hz.
上述的测试不仅说明C/N比值对定位精确度的影响,亦说明了已记录GPS数据所能进行的分析作业种类。在此测试中的GPS信号驱动记录作业,是在中国深圳(Shenzhen)北方的惠州市(Huizhou)所进行。并接着于德州奥斯汀(Austin Texas)测试实际的接收器。
结论
如整篇文件所看到的,目前已有多项技术可测试GPS接收器。虽然如灵敏度的基本测量,最常用于生产测试中,但是此测量技术亦可用于检验接收器的效能。这些测试技术虽然各有变化,但是均可于单一PXI系统中全数完成。事实上,GPS接收器均可透过仿真或记录的基带(Baseband)波形进行测试。透过整合的方式,工程师可执行完整的GPS接收器功能测试:从灵敏度到追踪其可重复性。
上一篇:基于PLC的模糊神经网络控制策略的应用
下一篇:基于单片机的室內甲醛浓度检测系统

