- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
FM—CW雷达探测器控制与信号处理系统设计
录入:edatop.com 点击:
摘要:本文阐述了该雷达探测器的数字信号处理过程,重点分析了动目标自动检测原理,并给出了该检测算法的实现步骤。根据该雷达探测器的特点和需求,设计了基于DS尸的控制与信号处理系统,详细给出了其软、硬件实现方案。该系统具有高性价比以及较好的通用性,已经成功应用于项目。
引言
调频连续波(FM—CW)雷达设备简单,发射频谱窄,发射峰值功率与平均功率相当,不存在近距离肓区和速度模糊,而且还具有近距离信号抑制功能等优点,因此采用该技术设计地面近程雷达探测器具有很强的优势。如果想发挥FM—CW雷达的优势,就要具有相应的数字信号
处理功能。
本文针对采用I、Q解调零拍接收技术的FM—CW雷达设计,以数字信号处理器(DSP)芯片为基本运算单元,以单片机为主控制器,构造了灵活、控制与处理能力强、通用性好、性价比高的控制与信号处理系统。该系统通过对目标多普勒回波信号进行滤波、相干积累等处理完成动目标自动检测过程和人机交互。
1 数字信号处理
本文涉及的FM—CW雷达探测器主要功能是检测动目标并且计算动目标运动的速度和方向(朝向或远离雷达站)。I、Q回波信号通过正弦解调后得到I、Q多普勒信号,数字信号处理器(DSP)通过对I、Q多普勒信号的分析处理完成动目标检测,其实现过程如图1所示。
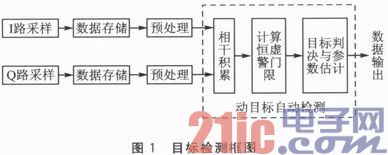
对I、Q两路信号先后同步采样,并把数据保存至相应的数据存储空间,采样完一帧数据后,DSP分别取出存储的两路N阶FFT数据进行预处理(主要是进行数据转换、去直流运算);然后对I、Q信号进行相干积累,获得相应的积累增益,然后针对功率谱分布情况,计算恒虚警率门限进行恒虚警率处理(CFAR);最后把最大的子滤波器功率值和计算的恒虚警率门限比较,若小于门限值,则认为没发现目标;反之,则认为发现目标,同时计算该目标的参数信息(包括速度、运动方向、相对幅度等),并按照规定的协议对目标参数信息打包输出。
1.1 预处理算法
当采用单电源进行A/D转换时,在模拟端不可避免的存在直流分量,而直流量的存在将降低数字信号处理的动态范围,因此降低直流分量很有意义。利用数字处理容易实现,其过程如下:
①根据下式分别计算I、Q数据的数学期望E1(x)和EQ(x)。

其中,N表示一帧数据的个数,xi表示第i个数据。
②根据公式yi=xi-E(x)(i的取值范围[0,1]),将I、Q数据分别减去数学期望值E(X),得到新的I、Q数据帧:
1.2 动目标自动检测
动目标自动检测主要包含相干积累、恒虚警率处理(CFAR)和目标判决与参数估计等过程实现。
1.2.1 动目标检测基本原理
众所周知,多普勒频率在雷达中目标的径向速度和回波多普勒频率存在如下所示的关系:
式中:c=3.08×108m/s;表示雷达的工作频率;fd和Vd分别表示目标的多普勒频率和目标径向速度。
根据式(3)可知,只需计算出多普勒频率fd就可获得目标的径向速度,而且通过fd可以判断是否发现目标。
雷达的多普勒效应表明:当目标朝向雷达站运动时,多普勒频率(fd)为正值,而当目标远离雷达站运动时,多普勒频率(fd)为负值,因此可以通过fd值的正负来确定目标运动方向。
为了实现目标多普勒回波相干积累,并计算其频率值大小和正负,采用快速傅里叶变换(FFT)方法实现,并且FFT技术实现N(一帧数据长度)个滤波器组(也称子滤波器),计算量小,方便硬件实现,是可行的。
1.2.2 动目标自动检测算法实现
雷达的工作环境背景非常复杂,回波信号中包含大量的随机噪声、杂波信号以及其他电磁波的干扰信息。目前的雷达探测器(系统)都要求能够在复杂和不确知的背景环境中检测目标的存在并保持给定的虚警概率。为此,必须自动实时计算恒虚警门限以保持恒虚警率实现。
算法实现步骤如下:
①对新的I、Q数据帧组合成复数,然后进行FFT运算,并对各子滤波器信号幅值求模。
②找出信号幅度前4的4个子滤波器并标记其滤波器位置(Mj)和幅度大小(VMj),并且把信号幅度最大的滤波器进行二次标记(滤波器位置为Mmax,信号幅度为Vmax)。
③根据式(4)求所有子滤波器的数学期望E(xx)和平均方差σ2,去除幅值最大的前4个数据有利于减少信号闪烁。
式中:N表示子滤波器个数(参与FFT运算的数据帧长度);Vi表示第i个滤波器的信号幅度。
④根据式(5)计算恒虚警率门限VT。
VT=αE(xx)+βσ2 (5)
式中:α、β表示加权系数;α、β值决定了目标判决门限VT,VT的具体值需要结合发现概率和虚警概率确定。
⑤把最大的信号幅度Vmax与恒虚警率门限VT相比较,若不小于VT值则认为目标存在,并且由Mmax值估计多普勒目标频率,然后根据式(3)确定目标的径向速度;同时也可以根据Mmax值确定目标远离或靠近运动,当Mmax
2 系统设计
该控制与信号处理系统设计原则:可靠稳定、性价比高、小型化。其总体设计如图2所示。
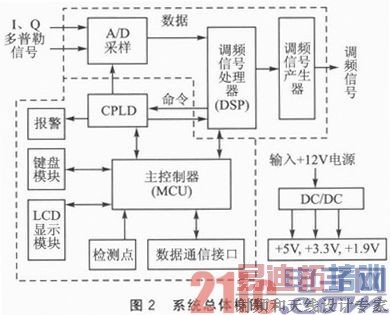
该系统主要是针对某型号FM—CW雷达探测器设计的,主要分为主控制器部分、调频信号处理部分和DC/DC电源。其工作流程:DSP控制模数转换器(A/D),对I、Q多普勒信号进行同步采样,同时把采集的数据保存在片内存储器中,直到一帧数据采集完成;DSP对该帧数据进行滤波、动目标检测算法处理,处理完成后把目标数据送至主控制器;主控制器(MCU)接收到目标参数信息后,按照规定的协议把目标参数信息打包并通过数据通信接口输出,同时按照预定的要求向CPLD输出控制信号,MCU还应及时接收键盘模块输出的数据和按周期采集各个检测点的数据,并且控制LCD显示模块正确显示各种状态;数据通信接口采用RS23协议。
CPLD主要是对控制命令进行译码和逻辑运算,按照正确的逻辑时序控制A/D采样和报警电路。
DC/DC电源部分,外部输入+12 V的电源电压,通过多个集成电源芯片分别产生+5V、+3.3 V、+1.9 V电压供系统工作。
2.1 主控制部分
主控制器部分,包含型号为C8051F023的单片机和型号为EPM3064的CPLD,其主要功能如下:
①控制系统自检。包括电压、电流检测、高频发射源和高频接收模块工作状态检测。
②实现对键盘模块管理、对LCD显示模块的控制。
③对数字信号处理的管理,并从信号处理器获取目标参数信息。
④对目标信息进行二次处理并进行数据打包,通过数据通信接口发送,从数据通信接口接收外部指令并进行相应操作。
⑤完成对DSP控制命令的译码和控制报警电路工作(主要由CPLD完成)。
2.2 数字信号处理部分
数字信号处理部分主要包含A/D采样、数字信号处理和调频信号产生器。其中A/D采样采用型号为MAX1306的芯片完成,数字信号处理采用型号为TMS320F2812的32位DSP实现。
调频信号产生器主要利用DDS技术,采用型号为AD9850的芯片实现。该部分的核心功能是参考图1完成动目标自动检测运算,数字信号处理器(DSP)软件流程图如图3所示。
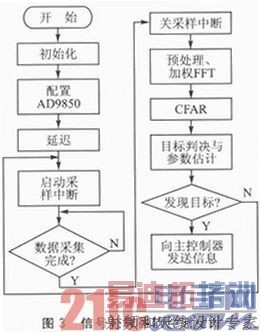
DSP开机上电复位后,初始化自身的配置,使得系统进入预定的工作状态;在正常工作状态模式下,按照AD9850的参考协议(本文采用的是串行3线制)配置寄存器,产生所需要的正弦调频信号,然后延迟等待;
直到雷达探测器高频部分工作稳定后,DSP启动采样中断,按照设定的周期控制A/D采集数据,直到I、Q两路分别采集完成1 024点数据(一帧),DSP关闭采样中断,然后数据进行处理完成动目标检测过程。首先DSP对采集的I、Q两路数据进行预处理,接着利用海明窗函数进行
加权并完成复数FFT运算,对运算结果做恒虚警率处理(CFAR),计算出恒虚警门限值,然后进行目标判决得出有无目标的结论。
若发现目标,则将目标的速度、运动方向、信号相对强度送至主控制器,最后重新启动数据采样,进入下一次运算。
结语
本文采用DSP十MCU+CPLD方式实现的控制与信号处理机已经成功应用于某型号FM—CW雷达探测器上,具有成本低、性能较高且应用灵活等特点。该系统也可以应用于其他领域窄带信号的处理,具有较好的通用性。
上一篇:三轴磁阻电子罗盘的设计和误差补偿
下一篇:PLC和触摸屏在国家体育场鸟巢中的应用

