- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于Atmega8低功耗智能微波探测器的设计
录入:edatop.com 点击:
摘要:微波具有直线传播、波段宽、设备小、穿透力和抗干扰能力强等优点,基于此设计了一种基于Atmega8低功耗智能微波探测器,经测试,该探测器灵敏度高、功耗低、稳定性好,适用于自动门控制开关、室内外安全防范系统、ATM自动提款机的自动录像控制系统、野外安全警示等场所。
微波是频率范围在300 MHz到300 GHz的高频电磁波,其波长从1 mm到1 m。微波具有如下主要特点:直线传播,很容易被反射;波段宽,可利用的频率多;微波设备比较小;对一些非金属材料有一定的穿透力,金属物体对微波有良好的反射特性;不受其他电磁波干扰。基于微波的上述特点,设计了一种基于Atmega8低功耗、网络化、微型化、抗干扰能力强的微波探测器,该探测器主要用于自动门开关,室内外安全防范系统、野外安全警示场所等。
1 硬件系统结构
微波探测器由电源、单片机最小系统、脉冲电源、放大整形电路、微波模块组成。其结构如图1所示。

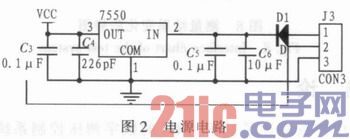
1.1 电源
微波探测器采用直流供电,该电源的稳压芯片采用HT7550低压差三端稳压芯片,该芯片具有超低功耗、低输入输出压差、低输出电压温漂、输出电压5 V,可以提供100 mA的输出电流。电源电路如图2所示。
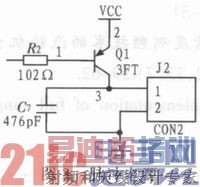
1.2 脉冲电源
为了降低系统功耗以及延长微波模块的寿命,本探测器对微波模块采用脉冲供电,利用单片机产生频率为1 kHz,占空比为2%的脉冲为微波模块供电,这样可以节省98%的能量,同时在脉冲供电环境下微波模块并不是时刻都在工作,所以又可以延长微波模块的使用年限。该脉冲电源的电路如图3所示,三极管的基极通过一个电阻连到单片机的脉冲输出引脚,发射极连到VCC上这样便构成了一个简单稳定的脉冲电源。
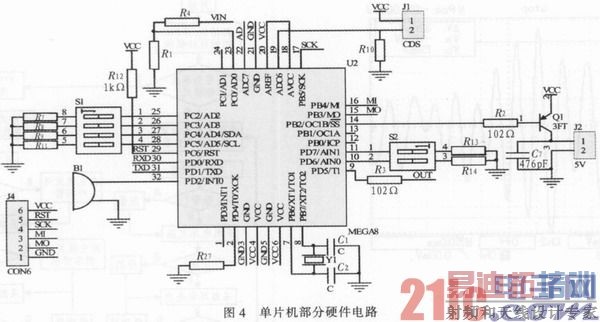
1.3 单片机最小系统
本文采用Atmel公司的8位高性能AVR单片机Atmega8作为主控制芯片,硬件部分电路如图4所示。图中R1和R4构成了分压电路对模块的输入电压进行分压,然后送入单片机进行AD转换,当检测到外部供电电池的电压低于标准值时进行报警。J1和R10构成了环境亮度检测电路,当环境亮度不同时该电路分出的电压也不同,将该电压送入单片机进行采样通过软件智能判断是黑夜还是白天,当白天时模块处于休眠状态,黑夜时模块处于警戒状态,起到低功耗作用。S1及其外部电阻构成了外部硬件灵敏度调节接口,可以进行16级灵敏度调节,实验数据如表1所示。S2及其外部电阻构成了报警时长接口,一共可以设置4种报警时长。B1为蜂鸣器,它可以进行现场报警,以及进行开机初始化提示,电池低电压报警等。接口J4为在线调试接口,通过该接口可以随时向单片机中下载程序,方便进行软硬件调试。电阻R27为工作模式选择电阻,当焊接上该电阻时选择为单点工作模式,通过硬件调节灵敏度以及报警时长,当该电阻未焊接时选择为联网工作模式,在该模式下相关设置可以通过串行接口发送到模块,同时模块也会向外不断地发送模块的工作状态,比如电池电压,报警信号,当前设置等信息。单片机的第9引脚为报警输出端,可以用它去驱动继电器来控制自动门的开关等。单片机的13引脚经过一个PNP型三极管后变为占空比为1%的脉冲信号,该脉冲信号去驱动MOS管Q2来控制中频信号的通断,避免了在微波模块上电的瞬间产生的电流冲击信号送入信号处理电路造成误报警,提高了系统的抗干扰性能。
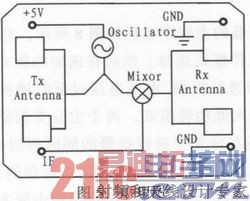
1.4 微波模块
本文采用的微波模块是GH100微波移动传感器,GH100微波移动传感器是X波段移动传感多谱勒模块,它由介质振荡器(DRO)和一对微带天线组成,微波频率为10.525 GHz。原理图如图5所示。该模块的工作原理是基于微波的多普勒效应。多普勒效应是当发射信号与接收者之间存在相对径向运动时,接收到的回波信号的频率(或相位)将发生变化。GH100微波模块集收发为一体,通过天线向周围空间发射无线电磁波,同时又由天线接收周围物体反射的回波,通过模块内部电路对收、发信号的相位进行比较,如果周围空间有移动物体存在,回波信号将产生频移与相差,最后从传感器输出一个低频率的电压。微波移动传感器是一种非接触式、功耗低、灵敏度高、体积小,不受热、噪音、湿度、气流、尘埃等周围环境因素影响,适合恶劣环境,理想的低成本移动检测器。
1.5 放大整形电路
由于传感器信号输出(IF)端的输出强度与发射能量的反射强度有关,一般在微伏级,所以需要一个高增益的低频放大器来处理该信号使它能达到用处理器来处理。放大整形电路如图6所示。图中MOS管Q2为信号开关,当微波模块上电时打开信号开关,当微波模块失电时关闭信号开关,这样可以防止干扰信号进入放大电路。信号通过信号开关后送入集成运放U1A的同相输入端进行放大,滤除高频的干扰信号后经电容C9耦合至后级电路,后级电路是一个引入了轻微负反馈的比较器电路,引入负反馈后可以增强本电路的抗干扰性能,改善输出波形,扩宽通频带,同时还可以消除电路的静态干扰信号,将低于门限的静态干扰信号滤除,然后将经过放大滤波整形后的信号直接送入单片机的AD采样通道进行采样,通过设置不同的阈值来改变灵敏度。放大整形后的部分测试波形如图7所示。
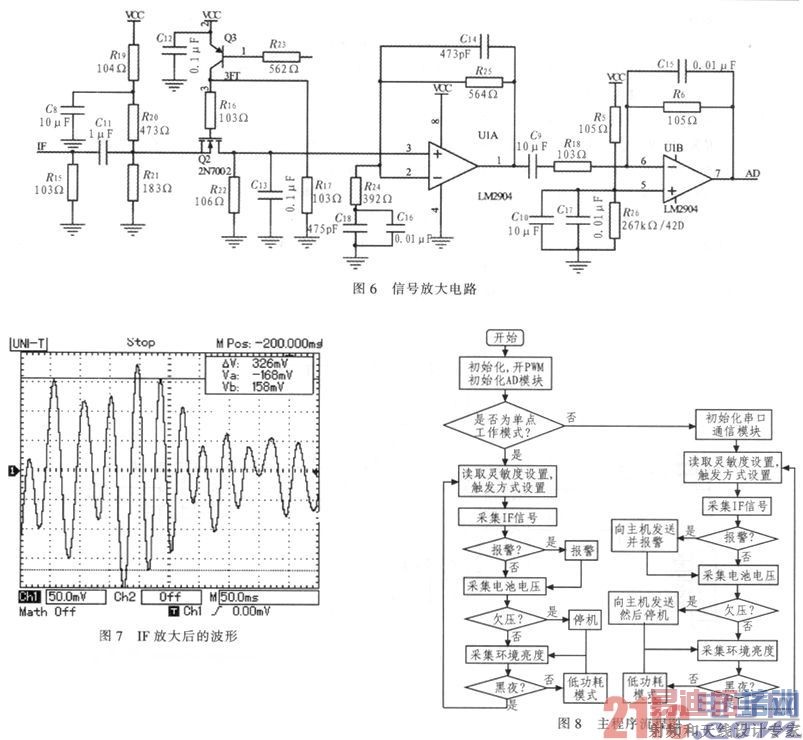
2 软件设计
微波探测器的主程序流程如图8所示。主程序初始化完硬件后进行工作模式选择,然后在选定的模式下循环扫描,有报警事件时进行报警,电池电压过低时停机,白天时关闭PWM输出,进入低功耗模式。两个主分支的结构基本相同,唯一不同的是右分支在进行报警的同时可以向主机发送信息,同时也可以接收主机的命令。串口通信的发送采用主动方式,需要发送的时候才发送,接收采用中断方式,一旦缓存器里面有数据立即进入中断去处理。
3 微波探测器的PCB图
微波探测器的PCB图如图9所示。
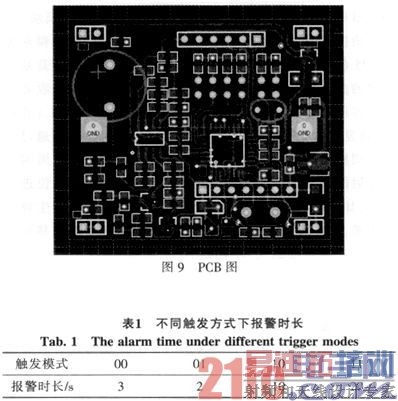
4 实验数据
软硬件统调是完成电路设计最关键的一步,通过不断地修改程序,微波探测器的功能已经达到要求,不同触发方式下的报警时长如表1所示。不同灵敏度时对应的有效检测距离是将微波探测器安装在半球型塑料壳内,并将其固定在室内2.6 m高处测试的,测试数据如表2所示。

5 结束语
本探测器充分利用了Atmega8单片机内部的软件资源,16级灵敏度调整,感应距离在0.8~10 m内可调。电路结构简单、体积小、功耗低、精度较高、软件的升级和更新方便,适用于自动门控制开关、室内外安全防范系统、ATM自动提款机的自动录像控制系统、野外安全警示等场所。

