- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
智能型通用水下自救释放系统
录入:edatop.com 点击:
摘要:为了保障海洋探测设备的顺利回收,尽可能减少人员或财产的损失,利用GPS和GSM网络模块以及防水电磁铁等相关器件,设计了一种智能且通用的水下自救释放系统。旨在水下设备遇到危险时,自救释放器释放自救浮标,用于告警和定位水下设备,使其安全回收,也可用于水下工作人员或其他水下目标的水面定位。
关键词:自救释放器;自救浮标;GPS;GSM/GPRS;AUV
0 引言
用于水下探测的设备品种繁多且价格昂贵,在海上实验时如何保障这些设备的顺利回收,尽可能减少损失,成为人们关注的焦点之一。目前的常用方法是为水下设备定制一套自救系统以保证其安全,但是这种方法一方面增加了设备的成本和研发周期,另一方面是其自救部分不具有通用性,应用范围受到很大限制。甚至许多水下探测设备没有自救装置,主要是依靠工作人员的保障措施,如固定设备或加系缆绳等。
本文旨在设计一种高可靠性,低成本且通用的水下自救释放器及与其配套的自救浮标,可以用于定位水下设备,保障其安全回收。
1 系统总体方案
该系统的外形结构设计如图1所示。其结构主要包括自救浮标、释放机构和控制舱3部分。自救浮标在备出现危险时被释放以通知岸上人员回收设备,释放机构主要负责自救浮标的释放,而控制舱则是采集设备数据进行决策控制的核心。
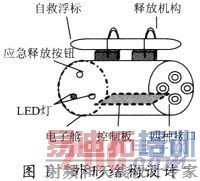
自救浮标中装有GPS模块、GSM/GPRS模块;释放机构主要部件是防水电磁铁,并以机械储能的方式释放浮标;控制舱内主要是以sPIC30F 4011单片机为处理核心的控制板,完成浮标释放命令的执行、参数配置命令的处理以及外部设备电源电压、工作温度、深度的采集等任务。舱内还有电源管理模块以实现电压转换和蓄电池的充放电管理等。
该系统体系结构如图2所示。
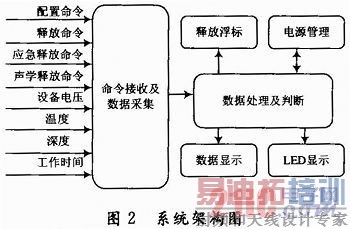
命令接收及数据采集模块主要负责接收外部命令和采集外部设备的工作参数。数据处理及判断模块是数据处理的核心,它根据命令接收及数据采集模块传来的数据进行判断,进而采取相应的措施,如通过显示屏显示数据,用LED显示外部设备的工作状态和释放自救浮标等。电源管理模块为控制舱电路板提供稳定的电源、管理蓄电池的充放电。
2 控制舱设计
控制舱核心处理器采用dsPIC30F4011单片机并嵌入实时操作系统μC/OS-Ⅱ,用来完成参数采集、通信、数据判断以及释放浮标等任务的执行与调度。控制舱外部有4种接口:串口接口、A/D输入接口、充电接口、声学释放命令扩展接口以及应急释放按钮(见图1)。在使用时,需先通过串口以一定协议格式对释放器监测参数进行配置(如设定传感器数据危险上限值等),此时需要上位机软件,其中上位机与单片机以串口的形式进行通信。出现危险时可通过串口向释放器发送释放浮标指令或释放器自身通过A/D输入接口监测设备工作状态进而判断释放浮标。声学释放命令扩展接口用于接收岸上人员发送的声学释放浮标命令,该接口为扩展接口。应急释放按钮用于水下作业人员通过按钮释放浮标。此外舱外还有LED灯,用于显示数据和外部设备的工作状态。舱内配有LCD显示屏,供开发调试使用。
在数据参数阈值判断方面,由于水下探测设备一般都会自带有温湿度传感器等装置,水下探测设备控制中心只需要通过串口将自身的各种特征值(如温度、湿度、深度、设备电压电流等)传给自救系统控制即可。之后,控制舱将实时监测这些数据的变化,一旦某一项数据超过危险值上限,控制舱驱动释放器释放自救浮标,从而通知岸上人员对设备进行及时回收。
3 释放器设计
自救浮标释放机构主要采用防水电磁铁来实现,而该电磁铁的吸合与释放主要通过继电器来驱动。程序设定为当控制舱单片机的I/O引脚输出为低电平时,继电器打开,电磁铁上电。自救浮标就会从释放机构脱落并且上浮,从而实现对外报警和自救的功能,如图3所示。

4 自救浮标设计
自救浮标的设计主要是三方面:一是信号接收,即通过GPS模块接收卫星定位信号并发送给微处理器;二是控制和无线通信,通过微处理器控制GSM/GPRS模块建立网络链接,把报警信号和定位信号以短信的方式发送给岸基控制中心;三是能源方面,鉴于浮标是在海面上,采用独立电源供电保证了系统有足够的续航时间。
自救浮标的外形设计如图4所示。其中,顶部放置射频天线,此处采用低功耗的ZYM-GA45(W)-3 GPS接收器和BENQ22GRPS收发模块,用来接收GPS信号,发射GSM/GPRS信号。天线下的浮球用泡沫材料做成,用来保证天线通信的顺畅并保持浮标在水中的平衡。浮标中间放置电路板和通信模块。电路板下层放置系统供电电池。浮标底部放置较重物品用来对浮标进行配重,以使浮标稳定地漂浮;最底部是防水接头,通过线缆与水下探测设备连接以进行拖曳,同时还完成与目标通信的功能。浮标外壳采用甲醛树脂材料加工制作,保证了系统的坚固、防水。
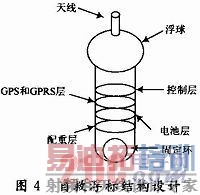
当自救浮标从释放机构脱离后,浮标部分便自动加电运行。开启GPS模块用来接收卫星定位信号,同时把该信号传送给微处理,微处理器通过发送指令来控制GPS模块跟GSM/GPRS模块,保障二者稳定工作。GSM/GPRS模块收到微处理器的指令以后,将GPS定位信号以短信的方式发送给主控制台。主控制台通过系统的处理,把定位信号在GIS电子地图上显示出来,使工作人员能够迅速地找出浮标所在位置。
为了保证自救浮标部分有足够的续航时间,除了在电路部分采用低功耗芯片和低功耗模块以外,电源的设计也是重点,它关系到整个自救系统的寿命,甚至整个系统的可行性。浮标系统采用6000mA锂电池单独供电,可在不影响浮标上浮的情况下保障系统连续工作48h以上。
5 系统调试与验证
5.1 控制舱部分
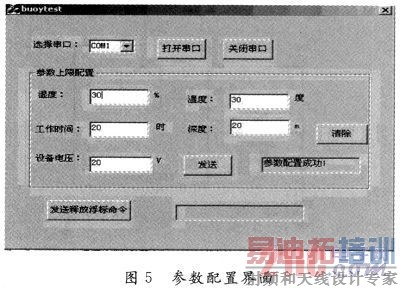
系统上电运行后,首先测试液晶显示及各传感器的数据采集是否正常,再进行参数配置。此时需要上位机软件。在PC机上编写如图5示的VC界面,以设置特征值上限。PC与单片机以串口的形式进行通信,通信协议如表1和表2所示。


有关表1的通信协议解释:PC机通过串口向释放系统发送此条命令,以配置释放器监测参数。‘S’表示参数配置命令。湿度,温度,工作时间,深度,设备电压是要配置的参数上限。如果释放系统传感器测试到的湿度,温度,工作时间,深度以及设备电压等某一项指标超过既定上限,则释放浮标。
有关表2的通信协议解释:外部设备通过串口与释放系统相联,只要外部设备出现异常,就会发送此条释放命令,释放浮标。‘P’表示浮标释放命令。
在图5中,硬件连好后,在文本框中填入要设置的参数上限值,然后点击打开串口按钮,再点发送。单片机接收到参数配置命令后,启动参数配置任务,如果参数配置成功,则会返回一条参数配置成功命令到PC,PC接收成功后,在文本框中显示“参数配置成功!”。
5.2 释放机构部分
测试时,通过模拟实际环境特征,比如给温度传感器一个高温度,控制舱主任务探测到温度异常后触发释放浮标任务,浮标脱落。而像工作时间、深度、设备电压上限值等的操作步骤和效果与温度类似,不再赘述。
5.3 自救浮标部分
浮标控制电路如图6所示。在测试时,插上SIM卡,并接上GPS和天线,然后接上电源,系统提取了时间、经度和纬度信息,并成功发送到手机号码为151****4500的手机上。设置的发送频率为3 min发送一条信息,发送频率可以通过手机发送短信进行设置。也可以通过发送短信或打电话的形式停止或者启动短信的发送。
6 结语
通过实践验证,控制舱能稳定地采集环境特征值,并且在环境特征出现异常时给电磁铁上电,释放浮标;自救浮标也能正常上浮并发送GPS定位信息给岸基控制中心。整个系统具有较高的可靠性和较长的续航时间。
上一篇:移动设备接收机的衰落性能测试及仿真
下一篇:矿用电子皮带秤井下计量仪表的设计

