- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
新型的基于倾角法海流测量仪的研究与开发
录入:edatop.com 点击:
摘要:为了在海流测量中更好地使用海流计获取真实的流速和流向信息,设计了一种新型的基于倾角法的海流测量仪。该测量仪采用Atmel公司开发的低功耗、高性能的CMOS型AT89S52单片机,通过串行口与上位机通信,利用VC++6.0友好的设计界面以及Matlab的绘图功能,实现对原始采集数据大容量存储、回放处理功能。海流测量仪操作简单,运行稳定,有较好的应用前景。
关键词:海洋调查;海流计;倾角法;VC++;Matlab
0 引言
21世纪是海洋的世纪,开发利用海洋资源是解决陆地资源逐渐匮乏的重要途径,各国政治、经济、科技也都离不开海洋。为了合理利用开发海洋资源,努力实现海洋资源的可持续利用,需要使用仪器设备对海洋进行调查、研究。其中,海流作为海洋水文三要素(海浪、海流、潮汐)之一,是海洋调查中不可或缺的参数,同时也是物理海洋学家们非常关注的海洋要素。掌握流场规律,可以更好地为国防、海运、渔业、港建等服务。
目前,海流的测量包括流速和流向两个参数,海流的测量方法根据所采用的方式和手段分为两类:漂流浮标测流法以及定点观测法。其中海流计是最常用的测流仪器。海流计从原理上又可分为机械旋桨式海流计、电磁流速计、声学多普勒海流计以及剖面海流仪等。国外海流计的研究起步较早,技术较成熟,1905年瑞典首先设计制造了厄克曼海流计;挪威生产的安德拉海流计,是目前全世界使用最广泛的海流计,最大使用深度为6000m;另外,美国生产的S4型电磁海流计,流速准确度高达±1cm/s,流向准确度为±2°。国内海流计的研究起步相对较晚,20世纪50—70年代主要以机械海流计为主,90年代国家海洋局海洋技术研究所研制的SLLY4—1型深水流速计,最大工作水深4000m。
与国外产品相比,国内海流计价格相对低廉,但是稳定性、测量精度等方面不及国外,因此市场占有率较低。本文介绍的基于倾角法的海流测量仪可测流速为0~300 cm/s,准确度为(0.02±1)cm/s,流向为0~360°,准确度为±2°。它采用低功耗、高性能的CMOS型AT89 S52单片机,通过串行口与上位机通信,利用VC++6.0友好的设计界面以及Matlab的绘图功能,对原始采集数据进行存储、回放。该测量仪操作相对简单,运行稳定,应用前景较为广阔。
1 测量仪原理及设计
海流是海水大规模并且相对稳定的流动,是海水比较重要的普遍运动形式之一。海流的观测包括流向和流速两个参数。其中,流速是单位时间海水流动的距离,单位为m/s或cm/s;流向是以地理方位角表示的,是指海水流去的方向,单位为(°);规定正北为0,顺时针进行旋转。
1.1 工作原理
本文设计的海流测量仪,是一种新型的基于倾角法的测流技术。外壳采用封闭式防水钢结构,主要包括圆柱型仪器仓、导流双翼、方型框架、重锤4部分。倾角法海流测量仪的外部结构图如图1所示。

理想状态下,如果海水有运动,在导流双翼的作用下,内含传感器的圆柱型仪器仓绕着x轴旋转;固定仪器仓的方型框架则会绕着x轴转动;倘若流速是固定值,那么圆柱型仪器仓的倾斜方向最终会与流向保持一致;与此同时,由于受到海流的影响,在导流双翼作用下,圆柱型仪器仓会产生不同程度的倾斜,其倾斜角与流速成一定比例关系,表达式如式(1)所示:
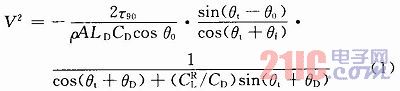
式中:V为通过海流测量仪的流速;θt为倾斜角;θ0为无流时的倾斜角;θD为举、拉中心和测量仪轴之间的夹角;θf为翼弦线和测量仪轴之间的夹角;τ90为无流时使测量仪倾斜90°所需要的扭矩;A为测量仪的区域(投影到平行测量仪轴的平面上);LD为从转轴到拉力作用中心的距离;CD为拉力系数;CL为升力系数;ρ为海水密度。在实际应用中,不但海流会对测量仪产生作用力,还会有多种因素参与其中,因此设计测量仪的结构时,应充分考虑各个因素的影响,力求将影响减至最低。
1.2 测量仪设计
本文介绍的倾角法海流测量仪可以实现将采集到的原始海流数据进行滤波、A/D转换、FLASH存储以及回放处理等功能。测量仪总体结构框图如图2所示。

1.2.1 硬件设计
倾角法海流测量仪选用了Atreel公司制造的低功耗、高性能CMOS型8位单片机AT89S52,它具有8 KB、1 000次擦写周期的可编程FLASH存储器。AT89S52单片机是倾角法海流测量仪数据接收电路的核心部分,它协调和组织其他各模块的工作。时钟电路采用美国达拉斯半导体公司生产的DS12887时钟芯片,内置锂电池,断电情况下运行长达10年不会丢失数据,以二进制或BCD码表示时间、日历。该测量仪采用Atml公司生产的串行接口的可编程闪速存储器AT45DB161。它拥有17 301 504位主存储器单元。采用微硅技术制造的倾角传感器测量海流流速。它的最大工作角度可达90°,测量精度一般可达到0.1°~0.5°。在硬件设计上通过增加2个低通滤波器并通过数字滤波来消除海流以外的波动影响。
选用电子方位传感器测量海流流向,该传感器具有不受环境温度变化和电源变化的特性。温度传感器采用的是集成温度传感器AD590,传感器输出的信号是电流,其抗干扰能力强,可以远距离传输温度信号。
由于RS 485通信距离长达1 200 m,倾角法海流测量仪采用RS 485串行方式进行通信。考虑到倾角法海流测量仪中AT89S52单片机接口电路是TTL电平,所以需要经过MAX485芯片实现与RS 485标准电平的转换工作。同时添加S2-485转换器实现RS 485电平与RS 232电平的转换,从而达到海流测量仪与上位机之间正常通信。硬件电路板图如图3所示。

1.2.2 软件设计
上位机软件采用Visual C++6.0与Matlab 7.1混合编程。Visual C++6.0是微软推出的一款C++编译器,将“高级语言”翻译为“机器语言(低级语言)”的程序,它是一个功能强大的可视化软件开发工具。Matlab 7.1是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。倾角法海流测量仪上位机软件结构示意图如图4所示。
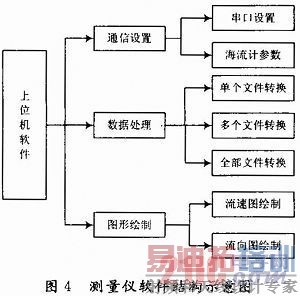
倾角法海流测量仪上位机软件包括三部分功能:
(1)通信设置。利用VC 6.0的MSComm控件设置串口号、波特率、数据位、停止位、校验位;
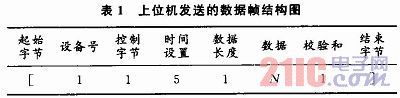
串口的开、关控制。倾角法海流测量仪机器编号、工作方式、起停设置;以及数据接收、保存设置。如表1所示。
(2)数据处理。将BCD编码方式的海流数据转换为可被用户识别的EXCEL文档,该部分可以对单文件、多文件、全部文件操作。
(3)图形绘制。利用Matlab 7.1强大的绘图功能,绘制某段时间内流速、流向随时间变化的二维曲线图。
倾角法海流测量仪上电后启动初始化,进入接收状态,它通过RS 485接口接收上位机发送的指令,做出相应的响应,一经确认进入工作状态。工作方式分为定时3 min,5 min,30 min采样间隔,数据回放。在每个采样间隔内分别对流速、流向采样30 s,温度采样3 s。如果接收工作方式字有效,方式字设为采样,启动定时器时钟芯片,开始进行采样管理初始化,分别对海流的流速、流向、温度数据采样,并进行数据处理。上位机发送给海流测量仪的数据帧结构如表1所示。其中,控制字节用于上位机对倾角法海流测量仪进行工作状态的控制;当倾角法海流测量仪接收到上位机发送的指令后,会向上位机发送返回信号,用来说明控制命令是否执行。
由于用二进制形式保存文件可以大大节省存储空间,所以倾角法海流测量仪将采集的原始海流数据保存为8421BCD码,但是字节与字符并不一一对应,用文本文件打开时,显示的数据为不易识别的乱码,用户分析时带来诸多不便。因此本文设计了数据转换程序。因为8421BCD码每4位表示1个十进制数,所以可以将包含海流信息的一串BCD码转换成字符串,按照一定的数据格式输出到Excel文件中。为了使用方便,本文不仅设计了单文件转换程序,还可以一次处理多个文件,供用户选择。关于数据分析处理方法、有效数据选取等数据处理规则参照国标(GB17378.2—1998)海洋监测规范相关章节。
2 实验与结论
倾角法海流测量仪不仅从理论上证明了可行性,而且与实践相结合,进行了大量实验,图5为倾角法海流测量仪与安德拉海流计在青岛栈桥水域测量数据对比图。实验证明,该测量仪工作稳定,操作简单,数据处理精度较高。倾角法海流测量仪可以实现的技术指标为:流速:0~300 cm/s,分辨率:0.2 cm/s,准确度:2%±1 cm/s;流向:0~360°,分辨率:0.1°,准确度:±2°;水温:-5~35℃,分辨率:0.05℃,准确度:0.1℃;海流测量最大水深为100m。

3 结语
本文设计了一种新型的基于倾角方法的海流测量仪。与国外产品相比,该倾角法海流测量仪成本较低、性能良好、运行可靠、操作方便、有较好的推广前景。
上一篇:基于MCP3906电能芯片和AT-Mega16单片机的单相电表计量设计
下一篇:GPTS3.0
在CTDS
中开发UUT
自动测试系统的应用

