- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于光纤导光的数字全息微形变测量系统
录入:edatop.com 点击:
摘要:建立基于光纤导光的数字全息干涉微形变测量系统,首先,利用1×2单模光纤耦合器将激光源输出光分为照明光和参考光,实现光路结构简单、紧凑和稳定性好;然后,通过短焦距和长焦距准直透镜分别对照明光和参考光进行准直扩束,使得参物光强度接近1:1,从而获得高信噪比的数字全息图。利用基于数字全息的双曝光方法对钢板的波长量级微形变进行实验测量。通过全息记录、再现及相位解包裹得到高精度的测量结果。实验结果表明,建立的基于光纤导光的数字全息微形变测量系统具有光路简单、稳定性好等特点,而且测量精度高。
关键词:数字全息;光纤导光;形变测量;相位解包裹
0 引言
数字全息采用光电探测器作为记录介质,计算机模拟参考光进行全息再现,可以获取物光的振幅和相位信息,重构物体的三维形貌。该技术具有可处理相位信息、高效自动化、实时测量、稳定性高等诸多优点,近年来被广泛研究和应用。特别在微形变测量领域,数字全息方法作为一种相干测量方法,具有非接触、实时性、高分辨率、全视场等特点,倍受众多研究者关注。双曝光全息干涉法是典型的用于微形变测量的方法,其原理是将初始物光波面与变形以后的物光波面相比较。在记录过程中对形变物面作二次曝光,一次记录初始物光波的全息图,一次记录形变后物光波的全息图。用原参考光进行全息再现,得到形变前后的两物光波面相干产生条纹,通过分析条纹,了解波面的变化信息。目前,数字全息光路主要采用透镜、棱镜、波片以及空间滤波器等光学元件构建相干成像光路,而这些分离光学元件稳定性不高且体积大,非常不利于测量系统的小型化、稳定性,大大限制了全息系统的实际测量应用。
采用光纤波导替代全息光路中各种分立光学元件,使系统更加紧凑、稳定,此外光纤可绕曲、抗电磁、耐腐蚀的特点,使系统适于复杂环境、封闭结构、强电磁和强腐蚀等环境。因此,本文设计并建立了基于光纤导光的数字全息微形变测量系统。具体方法是,利用1×2单模光纤耦合器将激光源输出光分为照明光和参考光,同时通过短焦距和长焦距准直透镜分别对照明光和参考光进行准直扩束,使得参物光强度接近1:1,以获得高信噪比的数字全息图。通过对发生了波长量级微形的钢板进行实际测量,验证了本文建立系统的可行性和优越性。
1 双曝光数字全息干涉测量原理
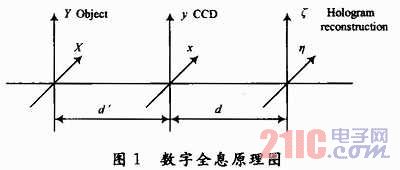
数字全息原理如图1所示。物参光在相机光敏面干涉记录,计算机模拟参考光,用菲涅尔-基尔霍夫衍射关系,对物光波进行数字重建,XY平面为物平面,xy平面为全息记录平面,ηζ平面为再现平面,d’为全息记录距离。
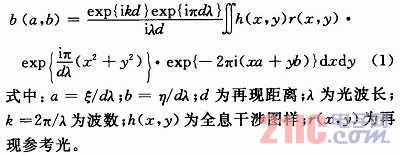
在满足菲涅尔近似条件的情况下,再现物光波表示为:
用CCD相机记录干涉图样得到离散化的数字全息图,进而再现物光场表示为:
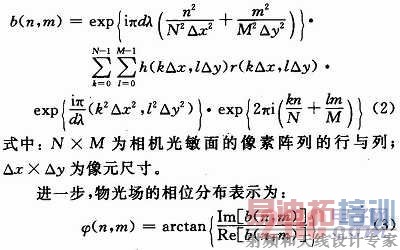
式中:Im为取虚部,Re为取实部。
全息双曝光干涉测量原理:基于物体状态变化前后再现物光场的相位差值得到物体形变或位移量。首先,物光场相位差表示为:
![]()
式中:φ1为原始物光场相位分布;φ2为变化后物光场相位分布。需要指出的是,由于计算机三角函数的计算特点,△φ的范围为[-π,+π],需要进行解包裹处理。然后,基于上述的物光场相位差,得到物体的形变或位移量为:
![]()
2 实验装置与结果分析
对于采用光纤波导的数字全息光路结构,光纤类型的选择是关键。多模光纤纤芯大,传输光能量较大,但由于其存在许多模式的光干涉,辐射斑点图对外部条件十分敏感,相位漂移难于补偿,导致条纹可见度降低和再现效率下降,因而不太适合做系统的导光介质。单模光纤出射光强近似为高斯分布,当光纤孔径与端面到被计算的平面的距离相比很小时,只用辐射的中心部分,目标平面为均匀平面波,因而用单模光纤可以不用空间滤波器。
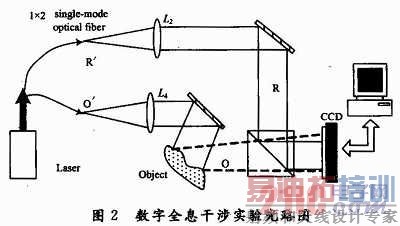
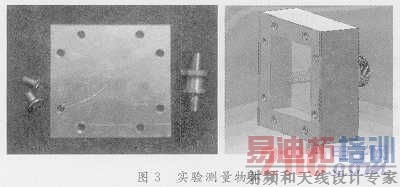
本文设计的全息光路如图2所示,其基本结构为Mach-Zender干涉光路。光源是功率为50 mW、波长为532 nm的倍频Nd:YAG固体激光器(Laser)。其输出光束通过1个1×2基模光纤耦合器分为物体照明光和参考光。由于单模光纤芯径为5/μm,为了避免激光耦合进光纤的效率不高,选用加拿大OZoptics公司生产的插座式非接触型激光光纤耦合器,耦合效率可达60%。进而,为了确保在生产全息图时,物光与参考光的强度比约为1:1,即为了获得高信噪比的数字全息图,作为照明光的光纤出射光采用焦距为125 mm(L4)的准直透镜进行扩束,而作为参考光的光纤输出光采用焦距为250 mm(L2)的准直透镜进行扩束。照明光照射物体,其反射光携带物体信息称为物光(O),然后和参考光(R)经非偏振棱镜合光后,以一小角度在记录面上相干叠加得到离轴全息图。用于记录全息图的相机像素阵列为1 024×1 024,大小为6.7μm×6.7 μm的CMOS相机。实验中通过计算机控制相机,实现全息图的数字化记录与存储。实验中的测量物体为四周固定钢板,如图3所示。钢板的尺寸为60 mm×60 mm、厚度为1 mm。通过高精度螺纹副挤压钢板施加压力,使钢板发生波长量级的微小形变。钢板面距离CMOS的距离,即全息记录距离为27 cm。
在全息再现计算中,首先采用Tukey窗对全息图进行切趾处理,以减小边缘衍射引起的光场起伏。然后,采用空频域滤波方法去除零级项和共轭像对原始像的影响,即对切趾后的全息图进行傅里叶变换得到其频谱,进而选取原始像对应的频谱分量,最后通过逆傅里叶变换得到仅包含原始像信息的全息图。接着,采用菲涅尔再现算法得到物光场的复振幅分布,即反映物体形貌的相位分布。
图4给出了实验结果。其中,图4(a)和图4(d)为钢板形变量的包裹相位图,图4(a)为较小形变时包裹相位图,图4(d)为较大形变时包裹相位图。从图可以看出,实验得到的相位差图条纹清晰、信噪比高,并且包裹图像条纹与形变物面的形变形状、形变位置、形变大小与实际相符,说明本文设计的基于光波导的光路结构完全可行。图4(b)和图4(e)分别是进行相位解包裹后的相位图,图4(c)和图4(f)分别为图4(a)和图4(d)横向中心线处对应的解包裹相位值。需要指出的是,针对激光数字全息得到的包裹相位图,枝切法解包裹得到的相位形变量精度最高,最小梯度加权最小二乘法的形变形貌恢复效果最好,因此实验中采用枝切法相位解包裹,然后经高斯低通滤波,得到较精确的形变量值。
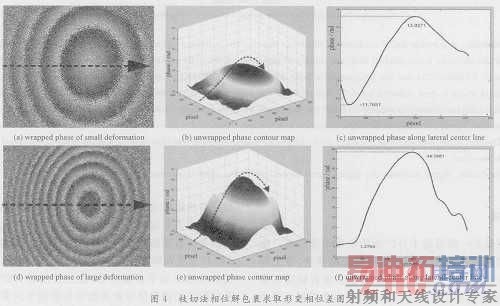
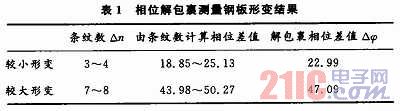
表1给出了实验测量形变相位差结果与传统数条纹法结果进行的比较,实验得到的解包裹相位差值恰好落在真实相位差值范围之内。实验结果表明,本文提出的基于光纤导光的激光数字全息微形变测量系统能够得到高信噪比的包裹相位差图,即高精度的测量结果,并且系统结构简单、紧凑、稳定性好。
3 结论
本文设计并搭建了基于光纤导光的数字全息干涉测量系统,采用1×2单模光纤耦合器实现分光产生照明光和参考光,并在照明光路和参考光路中分别采用短焦距和长焦距的准直透镜进行光束扩束,使得物参光在记录面上的强度比接近1:1,从而获得高信噪比的数字全息图。
采用基于数字全息的双曝光法对波长量级微形变钢板进行形变测量,通过数字全息记录、再现和形变包裹相位差图解包裹,得到形变相位差值。实验结果表明,基于光纤导光的数字全息干涉测量系统能够获得高信噪比的相位差图,进而得到高精度的物体微小形变量。因此,本文建立的基于光纤导光的数字全息干涉测量系统不仅体积小、重量轻、结构紧凑、稳定性好,而且测量过程简单且精度高。

