- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
利用LabVIEW和CompactRIO开发一个惯性检管器
录入:edatop.com 点击:

第一次管道中的现场测试
行业:
能源/电力, 石油与天然气/ 炼油/ 化工
能源/电力, 石油与天然气/ 炼油/ 化工
产品:
实时模块, FPGA模块, LabVIEW, cRIO-9014
实时模块, FPGA模块, LabVIEW, cRIO-9014
挑战:
寻找石油或者天然气管道的参考位置,并确保空间误差小于1米
寻找石油或者天然气管道的参考位置,并确保空间误差小于1米
解决方案:
通过使用LabVIEW实时模块和NI CompactRIO,设计和实现一个实时数据采集和处理系统,以管理在石油或者天然气管道内部通行的惯性导航系统(INS)的数据。系统实现了对数据的采集、预处理和储存,还可以利用LabVIEW对数据进行后处理,以获得最终结果。
通过使用LabVIEW实时模块和NI CompactRIO,设计和实现一个实时数据采集和处理系统,以管理在石油或者天然气管道内部通行的惯性导航系统(INS)的数据。系统实现了对数据的采集、预处理和储存,还可以利用LabVIEW对数据进行后处理,以获得最终结果。
"借助于LabVIEW,我们很容易实现对PIG(检管器)的编程,以满足任务要求。并且,我们还使用了相同的程序设计语言开发一个后处理程序,以便转换采集的大多数数据。"

PIG(检管器)是一个用于石油和天然气管道检验的工具,它插入管道中并且借助于关内液体流动产生的压力前进。PIG可以检验管道的变形和异常腐蚀情况,有助于排查可能造成生态事故的故障。为了降低成本并且在监测到异常情况后尽快更换管道,我们必须要知道异常现象的参考位置。惯性PIG被设计用于检测由地形运动产生的管道移位。
由于惯性PIG在地面以下运行,被管道所屏蔽,我们不可能获得连续的GPS信号。所以惯性PIG必须使用INS(惯性导航系统)来测量加速度和角速度,并通过综合的数据分析,获得仪器的速度、位置和方向。然而,由系统中还夹杂了由偏移和噪音等因素造成的传感器不精确的问题,随着时间的推移,定位准确度会下降。
一种避免偏移的有效方式是添加辅助测量。我们使用里程表和一些沿管道的GPS参考导航点,以便及时更新定位的位置。这些GPS标记借助于管道外的传感器采集到PIG通过的瞬间,并与检管器的惯性导航系统同步。GPS和INS的结合的测量方式被称作GPS辅助惯性导航。这种结构允许根据用于动态系统的迭代状态估计法(卡尔曼滤波器Kalman Filter)进行轨迹的寻迹和登记。虽然设置更多GPS点可以减少系统误差,但是这需要技术团队花费更多的准备时间。因此,我们选择了更节省成本的方案。
执行惯性PIG任务的计算机必须满足一些要求,包括在启动之前对现场所有传感器进行复杂状态检查,以避免影响整个任务。它还必须在高采集频率下,在60多个小时内持续实现对20多个传感器的管理。由于系统对耐温性要求高,并且必须能够抵御超过20G的冲击,还需要足够的小以放置到PIG内部,所以目前没有任何现成可用的硬盘可以在管道内存储这些数据。因此,我们在PIG内实施了实时统计无损耗浮点数据压缩法。
我们采用了一个带有现场可编程门阵列(FPGA)的
NI cRIO-9014
控制器,它小巧灵活,抗振性好,并且功能强大,足以满足PIG任务的苛刻要求。我们还使用了强大而易用的
LabVIEW
开发平台进行编程。图一中展示了惯性PIG的硬件架构。
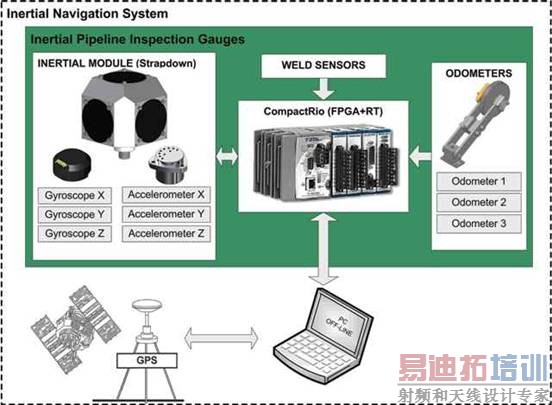
图
1
PIG
硬件架构
借助于LabVIEW,我们很容易对PIG进行编程,以满足任务要求,并且还开发一个后处理程序,以便把采集到的大量数据转换成管道中焊接点的参考位置。CompactRIO的FTP和TCP功能可以简化所有采集的数据的采集,还可以使用任何计算机或者PDA远程配置任务参数。
通过对任务中计算机VI进行远程访问,我们可以很容易诊断原型机的可能故障。这就使团队能够集中精神于开发数学算法,而非通信协议,来进行数据融合和统计分析。最终,借助于LabVIEW对于多核的支持,这些算法在乘以经过惯性导航和卡尔曼滤波器的状态空间估计的数千个矩阵之后,运行的更快。
项目开发仅用了18个时间,还包括了在完成机械设计之前所进行的一系列测试。因为我们设计的是能够输送液体而非固体的管道,我们必须实现一个复杂的悬浮系统,以保证INS的正常工作。检管器计算不正确,在管道内会有很多因素会导致PIG被破坏,例如阀门、转角、缝隙、限位器、液体流量,甚至是非法安装的用于偷窃燃料的阀门。因此,硬件和软件的开发必须与机械设计同时进行,以避免造成整个项目延迟的。
在开发过程中,我们需要一个平台用于测试算法。我们在一辆自行车上安装了CompactRIO控制器和传感器(图2),并且按照和在管道内使用PIG绘制路径地图一样的方式来绘制路径地图。
图
2
使用自行车进行现场试验
虽然我们从这个试验平台收集了许多数据,但是自行车比管道具有更多的自由度;因此最终我们用轨道小车(图3)来代替自行车,它提供了一个更像最终真实运行条件的试验平台。

图
3
使用轨道小车进行现场试验
最后,在装配好PIG机械结构后,我们在管道上进行了现场试验。之前所提到的每个现场试验平台都具有不同的特性,而LabVIEW可以快速适应于每个现场试验平台,以保证项目按时完成。我们利用NI的产品开发了所有软件,而一段文本代码都不用写。
在巴西和哥伦比亚,在投入商业使用将近一年的时间里,CompactRIO控制器经受了各种苛刻的考验。其中有一次,由于对接收程序的错误操作造成惯性PIG与管道底部正面相撞,撞击力非常大,破环PIG小车间的联轴器。这些由8毫米粗的钢条制成联轴器完全扭曲,并穿透了PIG外壳,到达了放置CompactRIO的位置。裂口使整个隔间都充满40大气压的增压汽油。虽然CompactRIO的数据采集卡被破环了,但是实时控制器在弄干并且清洁后仍然能够运行,使得我们抢救回了40小时任务的数据。这意味着,即使PIG几乎完全被破环,我们也能够收回所有的检测数据,而无需进行重复实验。
EngeMOVI和NI工程师已经经过了多次合作,实现了各种不同的项目:包括惯性PIGs、几何和磁性PIGs、用于深水管道检查的水下机器人、具有冗余运动功能的焊接机器人以及最近由NI 9505运动控制模块驱动的的机动PIG,这些合作获得了非常积极的结果。
我们开发的首个惯性PIG可以在直径为25.3~35.6厘米、长度为289.7英里的管道内行进。最大的可接受曲率是1.5D(D为管道直径),在管道内部行进的最大速度是8米/秒。初始原型正在不断被改进,并在其之上已经研制出完整的系列产品,我们深信NI提供的产品将会不断地在我们的新产品开发上扮演重要角色。
上一篇:利用LabVIEW和PXI开发一个适用美国海军潜艇
下一篇:利用CompactRIO
和LabVIEW在法国阿尔卑斯山脉研究雪崩中雪流特性

