- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
使用LabVIEW和PXI硬件对欧洲超大望远镜的主反射镜位置调整
录入:edatop.com 点击:
The Challenge:
开发一个电子装置以及 嵌入式控制 软件,用于对欧洲超大 望远镜 (European Extremely Large Telescope,E-ELT)中主反射镜的三个位置调整执行器的原型机进行控制和调整, 从而实现以纳米级的精度对90Kg的重物进行位置调整。这将作为未来之量产化电子设计的概念原型。
The Solution:
基于NI
PXI
平台运行的NI
Labview
Real - Time和
LabVIEW
FPGA
模块,可以提供灵活的接口来与多种设备通信,并且能够在保证较低的延迟和抖动下实现1 kHz的外部位置控制指令更新率;而对于实现内部定位的数据采样和伺服控制来说,则可实现更高的循环速率。
Author(s):
Miguel Nú
ez - Instituto de Astrofísica de Canarias
Yolanda Martín - Instituto de Astrofísica de Canarias
Marcos Reyes - Instituto de Astrofísica de Canarias
Teodora Viera - Instituto de Astrofísica de Canarias
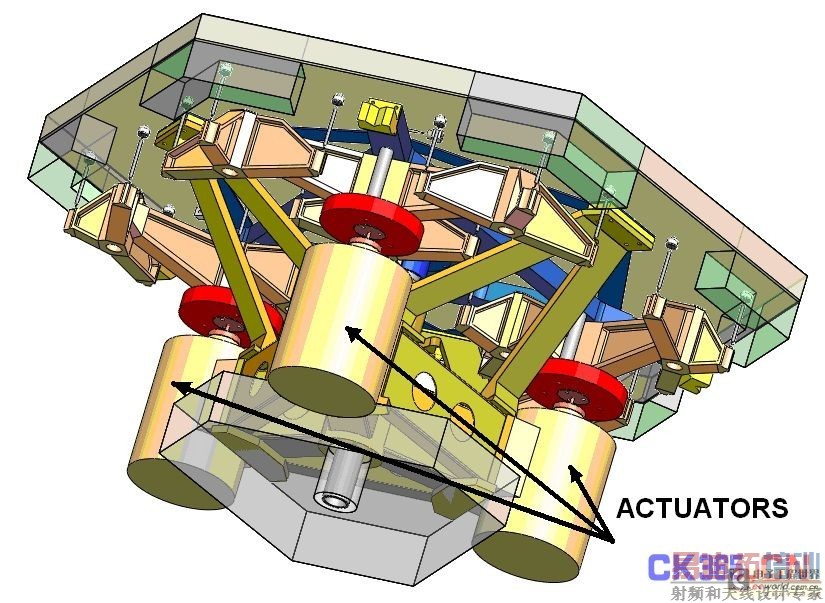
E-ELT是欧洲南方天文台(European Southern Observatory,ESO)倡议建设的一个直径42米的 望远镜 ,用于为天文学领域的最新研究探索提供支持。该主反射镜由984个镜面组成。如图1所示,每个镜面,可以通过三个位置执行器实时移动,用于对支撑结构因重力、温度、风动等因素所导致的变形进行补偿。西班牙航空系统公司(Compa ía Espa ola de Sistemas Aeronauticos,CESA)负责对三个位置执行器原型的机械结构进行设计和开发,而加纳利天体物理学研究所(Instituto de Astrofísica de Canarias,IAC)则负责对系统中的电子装置、软件和伺服控制进行开发。
执行器开发中最具挑战性的要求包括:达到15mm的行程、支撑90kg的重物、追踪缓坡信号时实现170纳米以下的均方根误差 (root mean square error,RMSE)、1 kHz外部位置控制指令更新率,以及确保极低的延迟和抖动(如图1)。
执行器机械设计方案分为两个阶段。在粗调阶段:使用无刷电机,实现一个大的调整行程和较粗的分辨率;在微调阶段:使用一个音圈电机,实现高分辨率、高带宽和小调整行程。每个调整阶段都将使用独立的电源设备、反馈传感器和伺服控制器。粗调和微调控制器协调工作,最终实现执行器的位置调整。
电子装置和软件是位于 PXI 机箱中,用于实现整体协调、外部命令管理、功能调试和伺服控制,运行有实时操作系统的控制器,可以实现极大的灵活性和计算能力。其中,快速微调伺服控制器通过NI PXI - 7842R现场可编程门阵列( FPGA )模块实现;而缓慢的粗调控制器则是通过NI PXI e - 8130控制器实现。此外,该软件设计分为两个部分:执行器的 嵌入式控制 软件和一个 望远镜 模拟器,后者可以作为辅助工具,用于模拟 望远镜 计算机与执行器之间的交互。
执行器软件
执行器控制软件是由位于NI PXI e- 8130实时控制器中的程序模块和位于 PXI -7842R FPGA 智能数据采集卡中的程序模块组成。实时控制器中的程序模块中含有每个驱动器的具体功能,包括:初始状态检查、状态机、状态字、错误寄存器以及配置参数管理。同时也包含其它任务,包括:通过串行外设接口(serial peripheral interface,SPI)收发外部命令来检查 FPGA 卡的输入;通过CAN或CANopen总线控制无刷电机驱动器,来实现粗调伺服控制;管理用于调试的循环缓冲器并同步接收来自 FPGA FIFO的数据,通过UDP/ IP读取传感器的反馈。 FPGA 卡则实现了SPI从属端的功能,负责微调伺服控制、模拟信号写入和读取,并且通过FIFO将数据传递至实时控制器来实现同步。
望远镜 模拟器
为根据要求对位置执行器进行测试,我们开发了另外一个软件,用来模拟 望远镜 计算机(通过SPI接口与位置执行器通信)。这一计算机扮演着SPI主控器的角色,而执行器则位于SPI从属端。此模拟程序以1 kHz的速率发送数百万个的位置命令,并以1KHz的速率通过SPI总线读取从属端的反应。此外,它还以5kHz的速率从一个安装于机械测试台上的附加外部位置传感器读取数据,用于对位置执行器的内部传感器进行交叉检查。这三个循环都需要以优于200us的精度进行同步,对数据进行二进制格式的存储以用于离线分析。在长为一小时的测试中,所存储的文件将大于100 MB。图2中的图形用户界面显示了命令管理、以及附加外部位置传感器数据的时域和频域同步显示。
我们所采用的解决方案使用一个带有数字I/O的NI PCI -7811R FPGA 卡,安装在基于Windows XP的电脑上(如图2所示)。
兼具实时性和灵活性
执行器的电子控制装置和软件包含多种接口(如图3所示),而且其中大部分接口都可以在开发的初始阶段进行更改,包括:
带有4MHz时钟的SPI接口,能够每ms接受一个外部命令
CAN总线接口,对粗调电机进行控制,并使用CANopen作为应用层协议,提供诸如行程限位和硬件报警等信息
模拟输出接口,控制微调音圈电机
模拟输入接口,监视微调音圈电机的当前状态
基于以太网的UDP/IP协议接口,读取外部位置传感器的电子装置中的数据
基于以太网的TCP/IP协议接口,下载并调试辅助的离线数据
数字输入接口,用于读取原点位置传感器的数据
使用这些接口需要极大的灵活性。
如下功能则需要实时特性:
使用SPI从属设备以80MHz的速率读取数字输入,在几微秒的时间内对一个新的外部命令作出响应
执行快速微调伺服控制,包括基于若干个2kHz到10kHz滤波器的PID(比例微分积分 - proportional integral derivative)控制,并且在开发的最后阶段可调
同步并存储二进制数据文件,用于SPI外部命令(1kHz)、音圈电机当前模拟输入(2kHz)、基于以太网的位置传感器数据采集(2–10 kHz)和伺服控制器内部变量(2–10 kHz)等数据的离线分析
使用商业现成可用的(commercial off-the-shelf,COTS)的平台满足这些要求,需要在灵活性和实时性之间作出折衷。然而,通过使用NI硬件,并通过 LabVIEW Real-Time 和 LabVIEW FPGA 模块进行编程,我们所获得的实时特性超出了上述要求,而且各种接口均可调整,无需牺牲灵活性(图3)。
结论
NI PXI 平台帮助我们在保持系统灵活性和实时性的同时显著减少了开发时间,而且能够满足电子装置/软件方面的设计要求。使用 LabVIEW ,可以在同一个软件环境中对实时控制器和 FPGA 模块进行编程,帮助我们快速集成系统,并确保系统独立、可靠。此外。此外,NI工程师为我们提供了快速且有效的帮助,让我们更快完成开发。
上一篇:借助于LabVIEW仪器驱动,可以轻松连接至任意仪器
下一篇:使用LabVIEW和PXI测量托克马克装置COMPASS中聚变等离子体

