- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
垂直度测量仪在汽车发动机缸体中的应用
录入:edatop.com 点击:
汽车发动机缸体的几何位置精度直接影响发动机的工作性能。为了实现对缸体加工误差的高精度、高效率测量, 湖北汽车工业学院研制了一台EQ491 发动机缸体垂直度测量仪,用于检测缸孔轴线相对于曲轴孔轴线的垂直度误差(要求< 0. 05mm) 和位置度误差(要求< 0. 15mm) 。
1 、测量原理
图1 所示为发动机缸体垂直度测量仪的测量示意图。测量仪主要由基座、立柱、缸体定位部件、水平方向精密滚动导轨及导轨工作台、垂直方向精密滚动导轨、电子塞规A、B 等部件组成。测量时,将被测缸体放入定位部件中,移动电子塞规A 和B ,分别插入缸孔和曲轴孔中进行测量。电子塞规A 和B上分别装有8 个(共16 个) 精密电感传感器,它们均匀布置在两个不同的测量截面上(如图2 所示) ,用于测量缸孔和曲轴孔四个不同截面的半径值Ri 。
f = 2 ×max{ Ri} ( i = 1 ,2 , ..., n)
在实际应用中,为简化计算,提高运算速度, 可用各被测点Oi 至最小二乘直线L 的偏差εi 代替各被测点至最小二乘直线L 的距离Ri ,即
f = 2 ×max{εi } ( i = 1 ,2 , ..., n)
这样处理带来的误差很小,对最终计算结果的影响可忽略不计。
2 、测量精度分析
根据上述测量原理,可知仪器的测量误差主要来源于传感器误差、缸体定位误差、水平方向和垂直方向滚动导轨的直线度误差、缸体标准件误差等。计算机A/ D 转换及数据处理误差很小,可忽略不计。下面对测量垂直度误差T1 时的测量误差作一分析。
(1) 传感器误差引起的测量误差
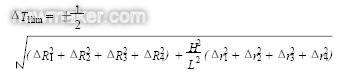
对垂直度误差T1 的计算公式求导后,函数T1的测量极限误差为
(2) 缸体定位误差引起的测量误差
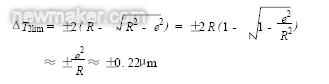
被测缸体在测量仪上的定位采用一面两销定位方式。当存在定位误差时,将引起测量点不准,缸孔测量偏心。由于传感器的测量值为孔的弦长,因此缸体定位误差引起的测量误差为
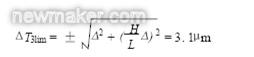
(3) 水平方向和垂直方向滚动导轨直线度误差
Δ引起的测量误差
测量仪所用滚动导轨的直线度精度为三级(即15μm/ 2000mm) ,则Δ= 3μm/ 400mm。Δ 引起的测量误差为
缸体标准件误差是影响整机测量精度的一项关键指标。通过精心调整和检测修正,最终将标准件误差引起的测量误差控制在ΔT4lim ≤±3μm。
(5) 误差合成
对上述各项误差进行误差合成,可得缸体垂直度测量仪的测量误差为
(1) 研制了采用准直激光束作为测量基准轴线、线阵CCD 光电器件作为传感器、由单片机进行数据采集、处理与显示的直线度自动检查仪,可对大型机床精密导轨副的直线度误差及运动精度进行高精度测量,整机示值误差可达0.02mm。
(2) 系统光路设计采用反射靶上的角隅棱镜使光线折返,可减小测量误差,简化整机结构,便于携带及现场使用。
(3) 采用最小二乘评定法编制了直线度误差评定软件,功能齐全,运算速度快,易于掌握。
通过对电感传感器测得的Ri 值进行数据处理,可用两个不同截面四点定圆心的方法模拟计算实际缸孔和曲轴孔轴线相对于标准缸孔和曲轴孔轴线的偏差,并计算出缸孔轴线相对曲轴孔轴线的垂直度误差和位置度误差。垂直度误差的计算公式为
1 、测量原理
图1 所示为发动机缸体垂直度测量仪的测量示意图。测量仪主要由基座、立柱、缸体定位部件、水平方向精密滚动导轨及导轨工作台、垂直方向精密滚动导轨、电子塞规A、B 等部件组成。测量时,将被测缸体放入定位部件中,移动电子塞规A 和B ,分别插入缸孔和曲轴孔中进行测量。电子塞规A 和B上分别装有8 个(共16 个) 精密电感传感器,它们均匀布置在两个不同的测量截面上(如图2 所示) ,用于测量缸孔和曲轴孔四个不同截面的半径值Ri 。
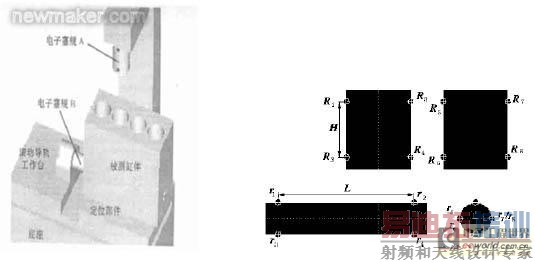
图1 发动机缸体垂直度测量仪测量示意图 图2 电感传感器测量位置分布示意图
f = 2 ×max{ Ri} ( i = 1 ,2 , ..., n)
在实际应用中,为简化计算,提高运算速度, 可用各被测点Oi 至最小二乘直线L 的偏差εi 代替各被测点至最小二乘直线L 的距离Ri ,即
f = 2 ×max{εi } ( i = 1 ,2 , ..., n)
这样处理带来的误差很小,对最终计算结果的影响可忽略不计。
2 、测量精度分析
根据上述测量原理,可知仪器的测量误差主要来源于传感器误差、缸体定位误差、水平方向和垂直方向滚动导轨的直线度误差、缸体标准件误差等。计算机A/ D 转换及数据处理误差很小,可忽略不计。下面对测量垂直度误差T1 时的测量误差作一分析。
(1) 传感器误差引起的测量误差
对垂直度误差T1 的计算公式求导后,函数T1的测量极限误差为
(2) 缸体定位误差引起的测量误差
被测缸体在测量仪上的定位采用一面两销定位方式。当存在定位误差时,将引起测量点不准,缸孔测量偏心。由于传感器的测量值为孔的弦长,因此缸体定位误差引起的测量误差为
(3) 水平方向和垂直方向滚动导轨直线度误差
Δ引起的测量误差
测量仪所用滚动导轨的直线度精度为三级(即15μm/ 2000mm) ,则Δ= 3μm/ 400mm。Δ 引起的测量误差为
缸体标准件误差是影响整机测量精度的一项关键指标。通过精心调整和检测修正,最终将标准件误差引起的测量误差控制在ΔT4lim ≤±3μm。
(5) 误差合成
对上述各项误差进行误差合成,可得缸体垂直度测量仪的测量误差为

(1) 研制了采用准直激光束作为测量基准轴线、线阵CCD 光电器件作为传感器、由单片机进行数据采集、处理与显示的直线度自动检查仪,可对大型机床精密导轨副的直线度误差及运动精度进行高精度测量,整机示值误差可达0.02mm。
(2) 系统光路设计采用反射靶上的角隅棱镜使光线折返,可减小测量误差,简化整机结构,便于携带及现场使用。
(3) 采用最小二乘评定法编制了直线度误差评定软件,功能齐全,运算速度快,易于掌握。
通过对电感传感器测得的Ri 值进行数据处理,可用两个不同截面四点定圆心的方法模拟计算实际缸孔和曲轴孔轴线相对于标准缸孔和曲轴孔轴线的偏差,并计算出缸孔轴线相对曲轴孔轴线的垂直度误差和位置度误差。垂直度误差的计算公式为
上一篇:加工中心在机测量对工序质量的提升
下一篇:几何量测量的四要素

