- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于Labview的光纤传感器相位解调技术
录入:edatop.com 点击:
随着对光纤性质研究的逐步深入,发现外界信号可对光纤中传播的光波进行调制,由此诞生了光纤传感技术1目前光纤传感器已经广泛应用于许多领域, 在地震检测、温度报警等方面广泛应用。各种类型的光纤传感器各有其显著的特点。光相位调制型传感器因其灵敏度高、便于实现全光纤传感等优点而在近年来得到了深入的研究.
1 相位调制型传感器调制基本原理与干涉解调结构
相位调制是指当传感光纤受到外界机械或温度场的作用时,外界信号通过光纤的力应变效应、热应变效应、弹光效应及热光效应使传感光纤的几何尺寸和折射率等参数发生变化,从而导致光纤中的光相位变化,以实现对光相位的调制.在光纤中传播常数为的光波通过长度为l的光纤, 会产生相位延迟:

则

式(2)中Δl为纤长l的变化;Δα为纤芯半径α的变化;Δn为纤芯折射率n的变化;所得即为光相位的变化。
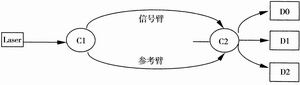
图1 基于2 ×2和3 ×3耦合器的马赫—泽德(Mach - Zehnder)干涉仪
图1为基于2 ×2和3 ×3耦合器的马赫—泽德(Mach - Zehnder)干涉仪。其中激光器发出的相干光经3dB耦合器C1分成光强比1∶1的两束光分别进入信号臂和参考臂光纤,再经3×3对称耦合器C2汇合相干形成调制的干涉条纹,在终端采用光电探测器D检测干涉光强的变化,在光纤参量基本恒定的条件下,信号臂与参考臂之间的位相差变化正比于外界信号。
由于目前的光探测器不能直接探测或读出光的相位差值,故通常采用干涉法将光的相位差信号转换成为相应的干涉条纹光强变化1由光束干涉原理可知,干涉仪产生的干涉光强I可记为:

式(3)中I0为干涉场的固定直流分量, K0为干涉引起的变化峰值(幅度) , p ( t)为外界信号的作用规律,而Φ则为光纤干涉臂不等长引起的固定相位差(通常计入p( t)中) .
干涉过程是一种非线性调谐作用,因此随着信号峰值及频率的不同干涉波形会产生很大的变化。图2给出了信号p( t) = p0×sin (wt) (其中p0为信号振幅, w为信号频率)时干涉波形随信号振幅的变化情况。
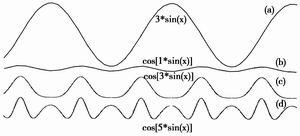
图2 原始信号与不同幅度调制信号比较图
由图2可见,和原信号(曲线a)相比,原信号幅度较小(曲线b和c)时,波形失真不大;而原信号幅度较大(曲线d)时,波形失真非常明显1因此在大信号情况下必须对输出的干涉信号进行解调才能恢复原始信号的频率和振幅。
2 当前使用的软硬件解调技术
解调不仅是将相位差变化转化为干涉条纹变化,其最终目的是从式(3)中解出原信号p( t) 。解调技术是实现信号恢复的惟一方法,也是相位调制型传感应用的关键和难点目前国内外的解调提取信号方法主要分为硬件和软件两大类。
2. 1 硬件解调提取信号方法特点
硬件解调提取信号方法主要是指完全依靠对电路和光路的设置或调制来实现相位解调的方法1按照信号光和参考光频率差是否为零,将解调分为零差解调和外差解调方法。为了实现全光纤化检测以及解决相移和振幅失配可能导致检测阈值降低的问题,目前通常采用零差解调方法。当前比较成熟的解调技术,除无源零差解调法之外,还广泛采用交流相位跟踪零差法( PTAC)和相位载波零差法( PGC)等有源零差解调法。比较而言,硬件解调的结构比较复杂,系统制造周期长,成本较高。
2. 2 软件解调提取信号方法特点
软件解调提取信号方法是指部分依靠PC机和软件实现解调的方法,其基本原理与硬件解调相同。除去光电探测转换部分采用的电路和光路之外,信号的处理由微机实现1软件方法省去了一般电路分析、制作、调试等步骤,不含有微分、相乘等易于引入噪声的相关电路。目前已有采用Turbo C成功开发软件解调系统的先例。和硬件相比,软件解调更加灵活,成本较低,开发周期短,易于调试。
2. 3 Labview软件的特点
Labview是美国NI公司开发的一种专门用于数据采集、分析与仪器控制的图形化软件1基于该软件开发的虚拟仪器可通过软件将计算机硬件资源与仪器硬件有机的融合为一体,从而把计算机强大的计算处理能力和仪器硬件的测量,控制能力结合在一起1Labview具有革命性的图形化开发环境,摒弃了传统开发工具的复杂性,为用户提供强大功能的同时还充分保证了系统灵活性。
3 实验研究
3. 1 实验系统原理
本系统使用3×3耦合器对称无源零差方法对相位差进行解调。系统前端采用如图1所示的3 ×3对称无源零差解调结构。根据干涉仪3×3耦合器3个相位输出的互补对称特性可知,从C2输出的3路信号在理想分光比( 1∶1∶1)的情况下,相位分别相差2π/3,即三端探测器(D0,D1,D2)组件输出探测电压:

式(4)中D为直流分量I0转换的电压幅值, A 为K0转换的电压幅值, m 为对应耦合器的探测器序号。
软件解调流程如图3所示:将3项Um 求和后除以3得到信号直流量D;从式(4)的3路Um中分别减去D,使其各自只余下干涉信号的变化量Xm;然后分别将Xm 对时间求导,得到dXm /dt;其后再将每一路信号Xm与另两路信号求导差相乘;依此处理的3路信号乘积和即可消去式( 4)余弦,仅剩余带系数的导数dp( t) /dt。考虑到此式系数中仍包含有条纹衬比度,故将Xm3路信号的平方和与其相除,再对结果求时间的积分,即可完整恢复原信号函数p( t)。
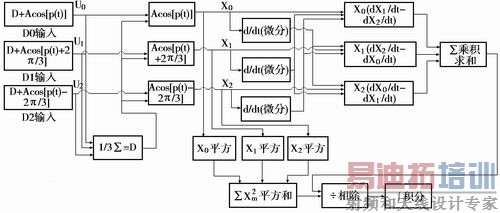
图3 软件信号解调部分原理框图
3. 2 实验结果
根据上述软件解调结构编写Labview解调程序,实现干涉信号的解调功能。实验中对各种情况下原始信号的解调结果进行了模拟和对比。
3. 2. 1 普通正弦信号的解调
当原始信号为Pa ( t) = 3π ×sin (2πf t) , f = 100 Hz时, p( t)可视为理想的简谐波1图3中各节点a、b、c、d的波形如图4所示。 由图4各关键节点波形图可见,软件解调可探测到与硬件解调对应位置相同的波形,说明简谐波Pa ( t)调制信号经过该程序后得到了正确恢复。 [p]
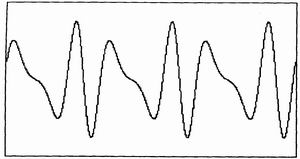
图4a 单路经过微分处理信号波形
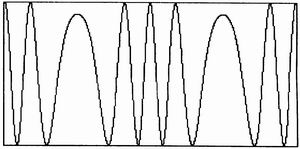
图4b 单路平方波形
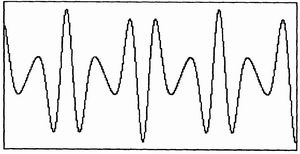
图4c 一路信号与另两路微分信号之差的乘积
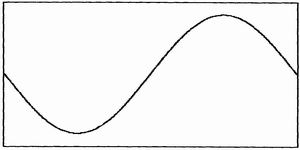
图4d 最终解调信号
图4 信号为Pa( t)=3π×sin(2πf t),f = 100 Hz时解调过程中各节点波形
3. 2. 2 叠加谐波时信号的解调
考虑到实际信号的复杂谐波构成,必须考虑解调程序在包含高次谐波时执行的情况1当原始信号为, Pc(t)=4π×sin (2πf t) +π×sin(12πf t) , f=100 Hz时, 原始谐波信号与解调信号如图5所示1由图5可见,软件解调可以恢复由谐波组成的原始波形。
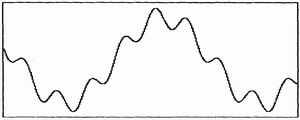
图5a 原始谐波信号
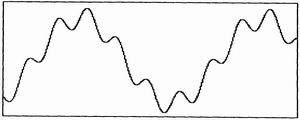
图5b 解调谐波信号
图5 原始信号为Pb ( t) = 4π×sin(2πf t) +π×sin (12πf t) ,f = 100Hz时解调图
3. 2. 3 探测器响应不均衡时信号的解调
由于探测器的光电响应物理特性不尽相同,可能导致3个探测电压(Um )出现偏差。现假设3路探测电压相差10%,当原始信号为Pc ( t) = 2π×sin (2πf t) , f = 100 Hz时,解调信号波形如图6所示。可见,当3路探测信号出现较小的不平衡时,解调软件可以基本完整的恢复原始波形。
3. 2. 4 3 ×3耦合器各端口相位差偏离2π/3时信号的解调
实际光耦合器的光功率分配比不可能达到理想状态,因此会导致相位差不准确1假设功率分配比不同导致相位差偏离2π/3达到10%即π/15,当原始信号为Pd(t) = 2π×sin (2πf t) , f = 100Hz时,解调信号波形如图7所示。从解调结果可知,较小的光功率分配不均衡对解调造成的影响可以忽略。
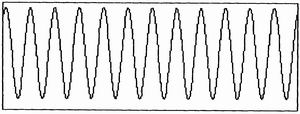
图6 原信号为Pc( t)且三路探测器响应度偏差10%时的解调波形
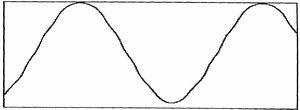
图7 原信号为Pd( t)且耦合器端口相位差偏离理想值10%时的解调波形
3. 2. 5 不同频率信号的解调波形
考虑到信号频率可能覆盖较大的范围,因此采用多种频率的原始信号进行解调测试,结果如图8所示。对于0~2KHz频率范围内的原始信号,这种软件解调方法均能实现完整的解调恢复。
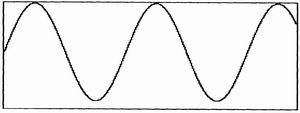
图8a f = 5Hz解调信号
图8b f = 100Hz解调信号
图8c f = 500Hz解调信号
图8d f = 2000Hz解调信号
图8 不同频率原始信号的解调波形
4 实验结果分析
上试验覆盖了实际传感系统中可能存在的非理想情况。从测试结果可以看出:在原始信号叠加有高次谐波、探测器响应度不均衡或耦合器相位差偏离标准值、原始信号频率较高等各种条件下,采用这种软件解调方法恢复的波形虽然出现了一定程度的噪声和波形失真,但仍具有较高的信噪比和基本形状,因此并不影响对原始信号的分析1总体而言,由Labview编制的基于3×3对称耦合器的软件解调方案可准确恢复中低频的原始信号。
如果结合软件的频谱分析以及阈值报警等函数,还可以进行事件类型的判断以及报警,从而具备一个监测系统的基本功能。利用Labview软件解调,还能够充分应用软件的强大功能:可以灵活地实现量程自动匹配而实现波形的完整复现;可以根据需要加入滤波器滤除信号谱外和以及微分引起的高频噪声;可以将采集的数字波形任意处理而不必如电路一般考虑的阻抗匹配以及负载过多等多种因素,便于信号多次重复利用。
5 结论
与目前常用的软件解调系统相比,使用Labview本身具有的多种信号数据处理模块,使得开发专用的波形时域和频域处理软件更为准确,直观,便捷。该系统不仅可以作为硬件解调系统的模拟仿真和有力补充,而且可以独立有效的执行信号处理和解调的全部功能。
1 相位调制型传感器调制基本原理与干涉解调结构
相位调制是指当传感光纤受到外界机械或温度场的作用时,外界信号通过光纤的力应变效应、热应变效应、弹光效应及热光效应使传感光纤的几何尺寸和折射率等参数发生变化,从而导致光纤中的光相位变化,以实现对光相位的调制.在光纤中传播常数为的光波通过长度为l的光纤, 会产生相位延迟:
则
式(2)中Δl为纤长l的变化;Δα为纤芯半径α的变化;Δn为纤芯折射率n的变化;所得即为光相位的变化。
图1 基于2 ×2和3 ×3耦合器的马赫—泽德(Mach - Zehnder)干涉仪
图1为基于2 ×2和3 ×3耦合器的马赫—泽德(Mach - Zehnder)干涉仪。其中激光器发出的相干光经3dB耦合器C1分成光强比1∶1的两束光分别进入信号臂和参考臂光纤,再经3×3对称耦合器C2汇合相干形成调制的干涉条纹,在终端采用光电探测器D检测干涉光强的变化,在光纤参量基本恒定的条件下,信号臂与参考臂之间的位相差变化正比于外界信号。
由于目前的光探测器不能直接探测或读出光的相位差值,故通常采用干涉法将光的相位差信号转换成为相应的干涉条纹光强变化1由光束干涉原理可知,干涉仪产生的干涉光强I可记为:
式(3)中I0为干涉场的固定直流分量, K0为干涉引起的变化峰值(幅度) , p ( t)为外界信号的作用规律,而Φ则为光纤干涉臂不等长引起的固定相位差(通常计入p( t)中) .
干涉过程是一种非线性调谐作用,因此随着信号峰值及频率的不同干涉波形会产生很大的变化。图2给出了信号p( t) = p0×sin (wt) (其中p0为信号振幅, w为信号频率)时干涉波形随信号振幅的变化情况。
图2 原始信号与不同幅度调制信号比较图
由图2可见,和原信号(曲线a)相比,原信号幅度较小(曲线b和c)时,波形失真不大;而原信号幅度较大(曲线d)时,波形失真非常明显1因此在大信号情况下必须对输出的干涉信号进行解调才能恢复原始信号的频率和振幅。
2 当前使用的软硬件解调技术
解调不仅是将相位差变化转化为干涉条纹变化,其最终目的是从式(3)中解出原信号p( t) 。解调技术是实现信号恢复的惟一方法,也是相位调制型传感应用的关键和难点目前国内外的解调提取信号方法主要分为硬件和软件两大类。
2. 1 硬件解调提取信号方法特点
硬件解调提取信号方法主要是指完全依靠对电路和光路的设置或调制来实现相位解调的方法1按照信号光和参考光频率差是否为零,将解调分为零差解调和外差解调方法。为了实现全光纤化检测以及解决相移和振幅失配可能导致检测阈值降低的问题,目前通常采用零差解调方法。当前比较成熟的解调技术,除无源零差解调法之外,还广泛采用交流相位跟踪零差法( PTAC)和相位载波零差法( PGC)等有源零差解调法。比较而言,硬件解调的结构比较复杂,系统制造周期长,成本较高。
2. 2 软件解调提取信号方法特点
软件解调提取信号方法是指部分依靠PC机和软件实现解调的方法,其基本原理与硬件解调相同。除去光电探测转换部分采用的电路和光路之外,信号的处理由微机实现1软件方法省去了一般电路分析、制作、调试等步骤,不含有微分、相乘等易于引入噪声的相关电路。目前已有采用Turbo C成功开发软件解调系统的先例。和硬件相比,软件解调更加灵活,成本较低,开发周期短,易于调试。
2. 3 Labview软件的特点
Labview是美国NI公司开发的一种专门用于数据采集、分析与仪器控制的图形化软件1基于该软件开发的虚拟仪器可通过软件将计算机硬件资源与仪器硬件有机的融合为一体,从而把计算机强大的计算处理能力和仪器硬件的测量,控制能力结合在一起1Labview具有革命性的图形化开发环境,摒弃了传统开发工具的复杂性,为用户提供强大功能的同时还充分保证了系统灵活性。
3 实验研究
3. 1 实验系统原理
本系统使用3×3耦合器对称无源零差方法对相位差进行解调。系统前端采用如图1所示的3 ×3对称无源零差解调结构。根据干涉仪3×3耦合器3个相位输出的互补对称特性可知,从C2输出的3路信号在理想分光比( 1∶1∶1)的情况下,相位分别相差2π/3,即三端探测器(D0,D1,D2)组件输出探测电压:
式(4)中D为直流分量I0转换的电压幅值, A 为K0转换的电压幅值, m 为对应耦合器的探测器序号。
软件解调流程如图3所示:将3项Um 求和后除以3得到信号直流量D;从式(4)的3路Um中分别减去D,使其各自只余下干涉信号的变化量Xm;然后分别将Xm 对时间求导,得到dXm /dt;其后再将每一路信号Xm与另两路信号求导差相乘;依此处理的3路信号乘积和即可消去式( 4)余弦,仅剩余带系数的导数dp( t) /dt。考虑到此式系数中仍包含有条纹衬比度,故将Xm3路信号的平方和与其相除,再对结果求时间的积分,即可完整恢复原信号函数p( t)。
图3 软件信号解调部分原理框图
3. 2 实验结果
根据上述软件解调结构编写Labview解调程序,实现干涉信号的解调功能。实验中对各种情况下原始信号的解调结果进行了模拟和对比。
3. 2. 1 普通正弦信号的解调
当原始信号为Pa ( t) = 3π ×sin (2πf t) , f = 100 Hz时, p( t)可视为理想的简谐波1图3中各节点a、b、c、d的波形如图4所示。 由图4各关键节点波形图可见,软件解调可探测到与硬件解调对应位置相同的波形,说明简谐波Pa ( t)调制信号经过该程序后得到了正确恢复。 [p]
图4a 单路经过微分处理信号波形
图4b 单路平方波形
图4c 一路信号与另两路微分信号之差的乘积
图4d 最终解调信号
图4 信号为Pa( t)=3π×sin(2πf t),f = 100 Hz时解调过程中各节点波形
3. 2. 2 叠加谐波时信号的解调
考虑到实际信号的复杂谐波构成,必须考虑解调程序在包含高次谐波时执行的情况1当原始信号为, Pc(t)=4π×sin (2πf t) +π×sin(12πf t) , f=100 Hz时, 原始谐波信号与解调信号如图5所示1由图5可见,软件解调可以恢复由谐波组成的原始波形。
图5a 原始谐波信号
图5b 解调谐波信号
图5 原始信号为Pb ( t) = 4π×sin(2πf t) +π×sin (12πf t) ,f = 100Hz时解调图
3. 2. 3 探测器响应不均衡时信号的解调
由于探测器的光电响应物理特性不尽相同,可能导致3个探测电压(Um )出现偏差。现假设3路探测电压相差10%,当原始信号为Pc ( t) = 2π×sin (2πf t) , f = 100 Hz时,解调信号波形如图6所示。可见,当3路探测信号出现较小的不平衡时,解调软件可以基本完整的恢复原始波形。
3. 2. 4 3 ×3耦合器各端口相位差偏离2π/3时信号的解调
实际光耦合器的光功率分配比不可能达到理想状态,因此会导致相位差不准确1假设功率分配比不同导致相位差偏离2π/3达到10%即π/15,当原始信号为Pd(t) = 2π×sin (2πf t) , f = 100Hz时,解调信号波形如图7所示。从解调结果可知,较小的光功率分配不均衡对解调造成的影响可以忽略。
图6 原信号为Pc( t)且三路探测器响应度偏差10%时的解调波形
图7 原信号为Pd( t)且耦合器端口相位差偏离理想值10%时的解调波形
3. 2. 5 不同频率信号的解调波形
考虑到信号频率可能覆盖较大的范围,因此采用多种频率的原始信号进行解调测试,结果如图8所示。对于0~2KHz频率范围内的原始信号,这种软件解调方法均能实现完整的解调恢复。
图8a f = 5Hz解调信号
图8b f = 100Hz解调信号
图8c f = 500Hz解调信号
图8d f = 2000Hz解调信号
图8 不同频率原始信号的解调波形
4 实验结果分析
上试验覆盖了实际传感系统中可能存在的非理想情况。从测试结果可以看出:在原始信号叠加有高次谐波、探测器响应度不均衡或耦合器相位差偏离标准值、原始信号频率较高等各种条件下,采用这种软件解调方法恢复的波形虽然出现了一定程度的噪声和波形失真,但仍具有较高的信噪比和基本形状,因此并不影响对原始信号的分析1总体而言,由Labview编制的基于3×3对称耦合器的软件解调方案可准确恢复中低频的原始信号。
如果结合软件的频谱分析以及阈值报警等函数,还可以进行事件类型的判断以及报警,从而具备一个监测系统的基本功能。利用Labview软件解调,还能够充分应用软件的强大功能:可以灵活地实现量程自动匹配而实现波形的完整复现;可以根据需要加入滤波器滤除信号谱外和以及微分引起的高频噪声;可以将采集的数字波形任意处理而不必如电路一般考虑的阻抗匹配以及负载过多等多种因素,便于信号多次重复利用。
5 结论
与目前常用的软件解调系统相比,使用Labview本身具有的多种信号数据处理模块,使得开发专用的波形时域和频域处理软件更为准确,直观,便捷。该系统不仅可以作为硬件解调系统的模拟仿真和有力补充,而且可以独立有效的执行信号处理和解调的全部功能。
上一篇:LabVIEW的格式与精度
下一篇:基于LabVIEW的多传感器信息采集平台

