- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
为什么抖动测试像盲人摸象(上)
录入:edatop.com 点击:
抖动测试对于高速信号是非常重要的,抖动测试不光能检查信号的质量,还能预测出BER。但是抖动测试方法业界并没有统一的标准,作为指导的也仅有MJSQ。
由于每种测试都采用了不同的硬件平台和测试方法,所以得出的抖动结果也不一样,有时候甚至大相径庭。一般来说采用了一种仪器来测试抖动的人没有这种困惑,但对于采用了多种仪器来测试抖动的人则不免疑惑“究竟哪种仪器的测试结果是正确的?”
本文译自Altera资深工程师DanielChow和Agilent抖动测试专家RansomStephens合著的《抖动测试方法的相关性和一致性》一文,该文通过两个方面的研究来解释大家所面临的困惑。首先,相关性研究检查了抖动测量的趋势和特性,说明了不同测量的相关程度。其次,一致性研究比较了由精密抖动发射器产生的经校准的抖动信号的不同测量结果,说明了不同测量值和真实值之间的不一致程度。
在相关性研究中,使用了大幅度的抖动,来理解不同抖动分量之间的关系。测量数据应该符合预期趋势,和预期趋势的总背离表明了抖动测量的不确定度。这种方法不需要精密的抖动发射器,一个简单的抖动发射器就能满足。
在一致性研究中,一个精密抖动发射器用来产生和真实值一样从高到低程度的抖动,可以理解为不确定度。在已知条件下研究测量结果可以得出关于抖动分析性能的正确结论和推导出不确定的主要原因。
抖动测试相关性研究
考察BER=10-12下不同程度的高斯随机噪声下的Tj时,众所周知的计算模型是Dual-Dirac,定义Tj=Dj+14Rj。
对于线性比例的Rj,测得的Tj必须符合斜率为14的线性趋势。缩放比例和趋势将揭示Tj测量的正确性,而忽略Rj,Dj,Tj值的精度。
分析可以评估所有抖动分量的正确性:Tj,Dj,Rj,Pj,DDj,DCD,ISI。
抖动分析仪器和方法
研究将涉及到5种硬件平台和7种抖动分析方法,5种仪器是一台BERT,2台实时采样示波器,一台等效采样示波器,和1台时间间隔分析仪。一些仪器允许用户从几种抖动分析方法中做出选择。简便起见,每种方法被称为“ScopeA”到“ScopeF”。
所有的方法都可以将Tj分解为Rj和Dj。大多数提供Pj和DDj分析,但是只有少数提供DCD和ISI。Rj可以通过直方图或底噪积分获得,尽管一台仪器使用直方图,但Pj通常采用FFT获得。DDJ和其分量通常由边沿转换定位平均获得,但是有一台仪器使用了频谱分解。
一些仪器,对于特定的高速数据标准采用了将抖动带宽限制在fc/1667和0.5fc之间。这个特性任何时候都适用,然而由于抖动带宽被抖动发生器限制,会对测量值产生轻微的影响。
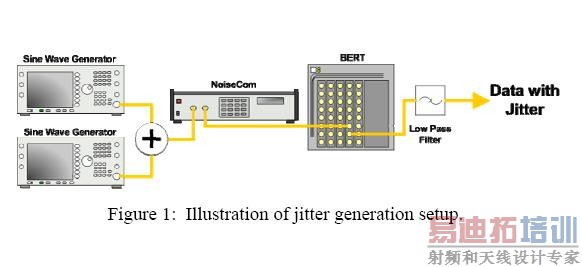
抖动生成
为了评估这7种方法,需要一台线性抖动发生器,这将通过对一台BERT进行时间延迟调制完成。这个线性调制器将外部电压转化为在数据输出信号上的时间延迟。注入调制器电压和数据信号中的抖动是成比例的。这个调制器带宽为200MHz,最大调制幅度为500ps.
图1展示了抖动发生器的设置。Pj由正弦信号源生成,Rj由NoiseCom符合高斯分布的白噪声源生成,但没有进行BER=10-12下的电平测试。Rj和Pj信号注入到BERT的时间延迟调制器,ISI由BERT上数据输出利用4阶贝塞尔低通滤波器生成。
实验
所有抖动测量都遵循仪器制造商的指南。统计精度是必需的,足够多的数据可以增加信心。在所有的场合,多次测量用来获得标准偏差少于5%平均值。每一种方法,都逐字逐句地记录了抖动值。为了优化设置参数而获得最好的测量结果,一些仪器要求高级知识。在这个研究中,我们假定每种仪器通过制造商的文档和/或技术支持获得的知识是可信赖的。
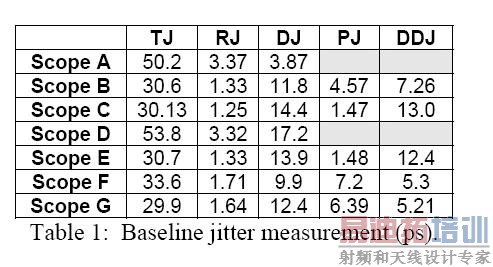
仪器底线
测试用信号来自未加任何调制的BERT,BERT固有的Rj,Pj,DCD可忽略,比如Rj固有抖动小于1ps。下表显示了每种仪器的抖动。ScopeB,C,E,F,G大多数抖动分量都一致,然而ScopeA和D在Tj和Rj上一样。不同仪器在噪底上存在着巨大的差异,如果用Tj计算大概是50%,典型值为30ps。
常规条件
我们定义了一系列采用了大量压力测试的“常规”条件。产生如此大抖动的器件在每一种串行数据规范中都是失败的,好处是我们可以观察在恶劣条件下的表现,缺点是使得在一致性研究中需要的Scope噪底被淹没。常规条件如表2
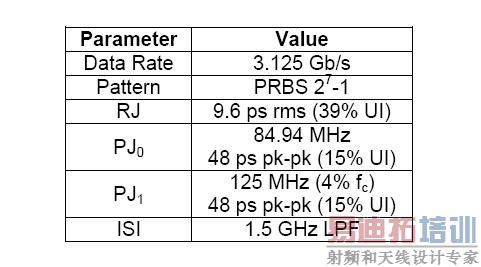
表2由于是源是未校正的,被引用抖动的绝对水平应该被用来进行相关性研究,精度大约是15%。
通过在观察示波器上联合了时间延迟调制器设定的电压来估计RJ和PJ源输出。我们在常规条件下测量的抖动结果如下。
Rj的正常水平是9.6ps,在BER=10-12下,大约是42%UI。NoiseCom具有高斯特性的源没有认可。高斯Rj的偏差会在不同的分析技术上导致不同的影响,这会扭曲他们的真正的精度。一致性研究中使用的高斯源用来验证1T中不确定度为1.5%的一份。
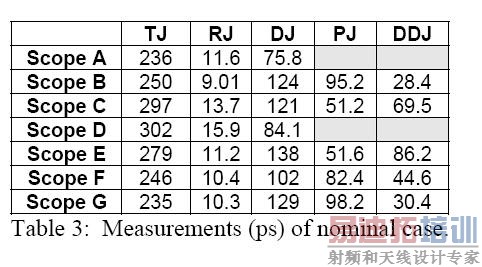
估计BER=10-12下Tj的范围是235ps到302ps,除了ScopeC和D给出了和期望值一样的值,大多数测量都在250ps。Pj的正常水平是96ps,因为Pj0和Pj1是不同步的。ScopeB和G给出了在期望值+/-2ps内的最好结果。ScopeF给出了在期望值15%以内的中等值。ScopeC和E给出了期望值一半的结果。这些仪器间在测试DDj时区别更严重,最小值28.4ps和最大值86.2ps。
从测试情况看,很难探知任何方法的准确度。然而,当我们开始改变抖动的每一分量时,码型形成了。
变化的条件
我们做了4个实验,每次改变抖动的一个分量,其他所有的抖动分量均是非常大的压力常规值。如表4所述。

第一个实验是改变Rj幅度,范围3.2~16psrms,这相当于3.125GbpsUI的14~70%。第二个实验是改变Pj1的幅度,覆盖了16~80pspp相当于5~25%的UI。第三个实验是改变频率覆盖了1~3GHz拐角为-3dB的ISI低通滤波器,相当于涵盖了32~96%的速率。第四个实验还是ISI,但是是改变发射数据码型。码型长使用类似于时钟的(“1010···”),混合频率(k28.5),PRBS7,PRBS10,PRBS15。这些码型分别体现了最长为1,5,7,10,15码长。
数据
实验1:不同的Rj
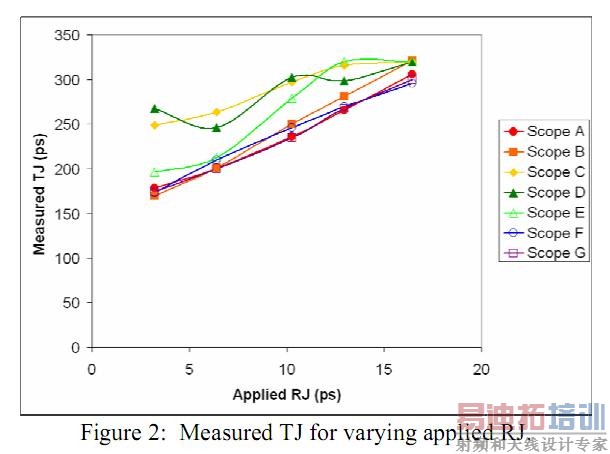
如前所述,在不同的Rj下,Tj遵循斜率为14的线性趋势,截点是Dj。
图2展示了所有7种方法测量到的Tj趋势是Rj的函数。可以看到ScopesA,B,F,G体现了非常一致的响应,测得Tj值差别在10%以内。各自的趋势接近线性,拥有相同的斜率和截点。如果允许大的错误裕量,ScopeC稍有点线性,然而对应的斜率和期望值相差很远。ScopeD和E展示了明显的非线性趋势,这大大超出了预期。
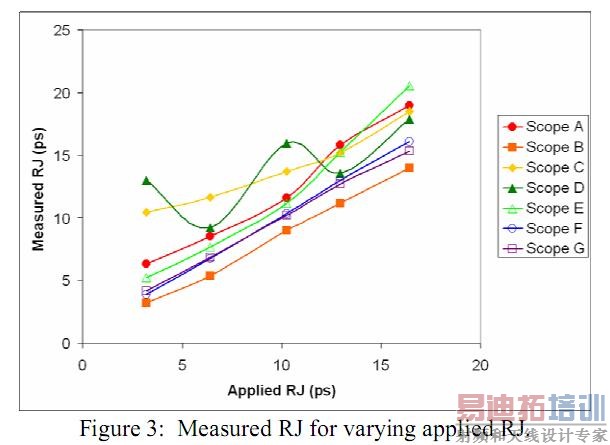
类似的,我们查看测试到的Rj值并和应用的Rj值比较,在这种情况下,预测到的趋势是线性,但是一个斜率和截点接近于0(由于微小的固有抖动)。图3展示了不同Rj的测量值,ScopesF,G拥有和预期最接近的趋势。ScopeB展示了相同的趋势,但是Rj最小。ScopesA和E展示了对于低的Rj预期响应,但是高Rj值背离。ScpeC虽然表现出来了一点线性,但是有过小的斜率和过大的截点。ScopeD的宽波动范围体现了高非线性。
Djpp值是独立于Rj,但是在Dual-Dirac模型中使用了依赖于Rj变化的Dj定义。Djpp值不会随着Rj的变化而变化,但Dual-Dirac中Dj趋势是随着Rj的增加而减少。
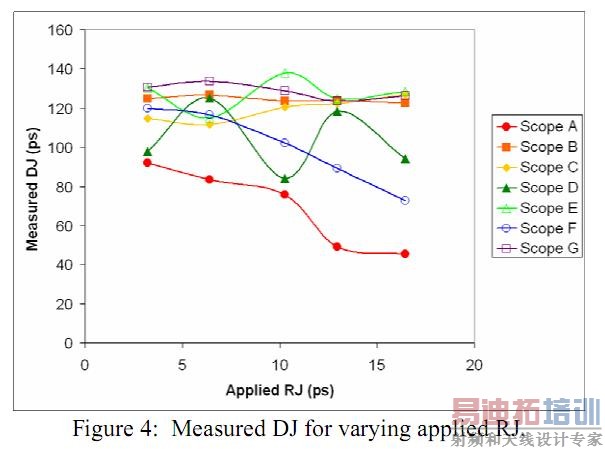
图4展示了Dj的测量值随着Rj变化的趋势。ScopesB,C和G遵循Djpp预期的平坦响应。ScopesE虽然在相同的范围内,但是展示了明显的非线性特性。ScopesD再次展示了大的波动。
ScopesA和F报告了Dual-Dirac模型中Dj的依赖定义,并展示了预期的下行斜率。
这个例子说明了用户需要知道他们的测试方法是否和他们的测试目的一致,不能低估这种错误。ScopesB,C,G的结果表明他们报告Djpp值,将会产生一个高的Dj值和由Dual-DiracDjpp引起的Dj一致性裕量误差。这就是Dual-DiracDj模型对于串行数据规范约束而不是Djpp值,这总是导致Dual-DiracDj小于Djpp值。
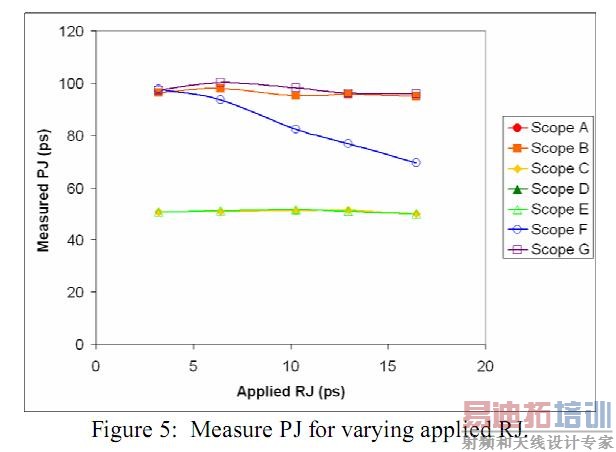
Pj是和Rj无关的,对于不同的Rj值希望它拥有一个平坦响应。图5展示了Pj测量值随着Rj变化的趋势。只有ScopesB,C,E,F,G获得了Pj值。注入的总Pj大约是96ps。ScopesB和G在正确的值上体现了相对的平坦趋势。有趣的是,在预期值的一半ScopesC和D拥有相同的表现。当可以准确地辨识多种Pj分量时,决定了ScopesC和D仅仅在结果上反映巨大的单一Pj。
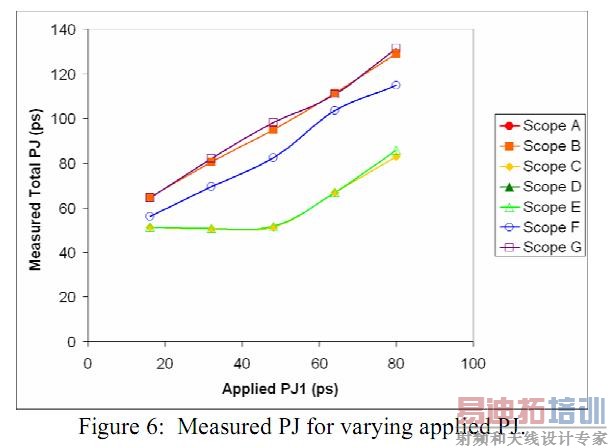
实验2,不同的Pj1幅度
第二个实验是改变Pj。常规条件下的Pj包括Pj0和Pj1。Pj0的频率和幅度是恒定的,只有Pj1的幅度是变化的,从而导致了总Pj的变化。
总Pj的测量值是是斜率为1和截点是48ps呈线性趋势Pj1幅度的函数。图6展示了总Pj测量值的特性。我们看到ScopesB和G拥有和预期非常接近的趋势。ScopeF拥有预期的斜率,但是在整个范围内低估了10ps。这和前节分析的PjvsRj是一致的。ScopesC和E是不规则的,但是和仅报告了巨大的单一Pj分量的观点是一致的。
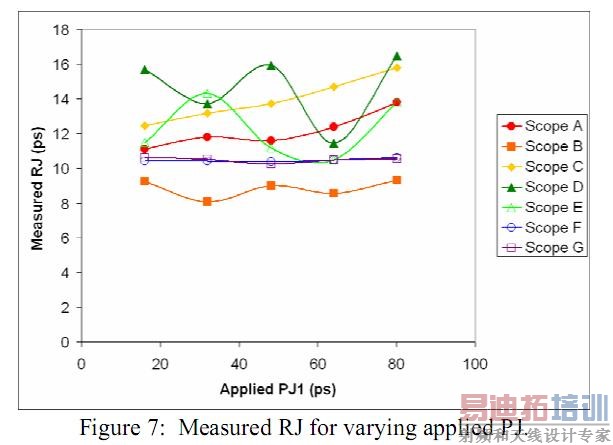
对于不同的pj1幅度,Rj预期都是不变的9.6ps。图7展示了Rj测量值。我们看到ScopesF和G的趋势是非常平坦和靠近期望值的。ScopesB,A和C越来越背离预期趋势。ScopesD和E则呈非线性和大的波动。
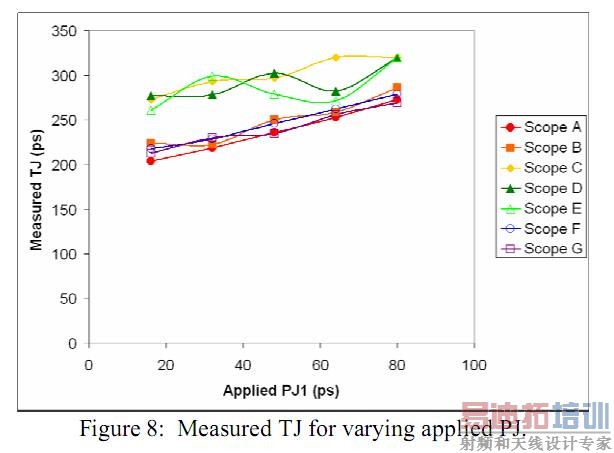
Pj和Rj的趋势,还有其他的抖动分量,最终现出Tj的趋势。图8展示了Tj测量的特性。ScopesB,F,G的Pj和Rj测量精度直接决定了Tj的的测量精度。同理,ScopesD,E的Rj测量的差劲表现将直接导致Tj测量的差劲表现。
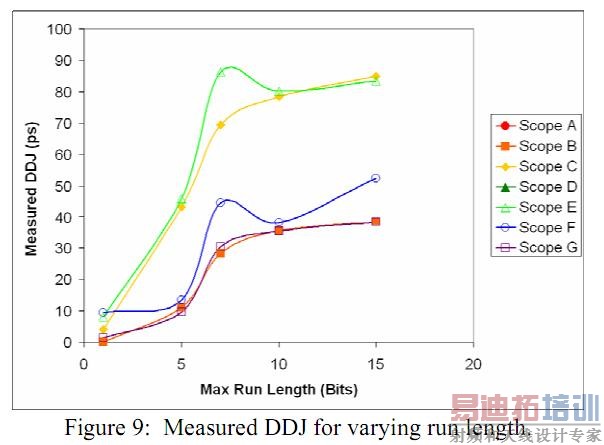
实验3:不同的码型长度的ISI
另一个产生ISI的方法起源于数据信号边沿的幂指数传输。这种方法显示,当数据码型最大的码型长度在低码型长度(<5~10)变化时,ISI的增加是非常显著的。对于高码型长度(>10),数据信号通常已饱和,ISI不会再增加。
图9展示了对于不同码型长度DDj的测量趋势。在所有的情况中,ISI强烈依赖于低码型长度,而在高码型长度时饱和。
我们没有额外的准则去判断测量的准确度。然而如果我们考虑前面所有实验中的分析结果,ScopesC和E是不准确的。因此我们可以断定ScopesC和E有相似的不准确度。ScopesB,F和G报告了和ScopesC和E是非常不同的相似结果,也证明了这一点。
相关性测试的小结
这些分析展示了在异常恶劣的非现实环境下分离和测量抖动的不同方法。我们看到一些仪器将某一抖动分量从其他分量中分离出来是非常困难的。类似的,不管怎么平均,我们也看到一些仪器给出了非常不一致的测量结果。

