- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于虚拟仪器的远控系统自动测试技术
录入:edatop.com 点击:
0引言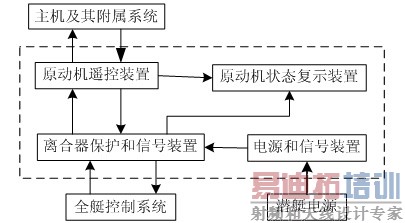
图1远控系统组成及与其它设备的连接关系
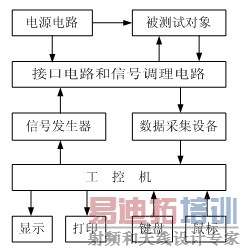
图2自动测试系统硬件组成示意图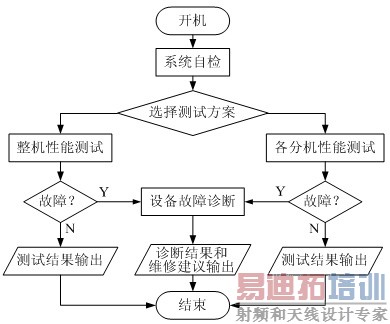
图3自动测试系统软件程序框图
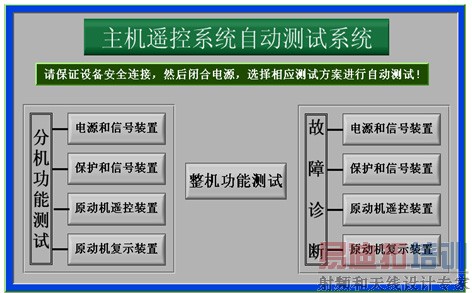
图4自动测试系统主界面
虚拟仪器技术是现代计算机技术和仪器技术深层次结合的产物,是当今自动测试领域的一项重要技术。其核心是利用飞速发展的计算机技术,通过共享计算机内部的软、硬件资源,编制、运行仪器软件,建立图形环境和在线帮助机制,完成数据分析和处理功能,用灵活的虚拟软面板实现仪器的激励、测试和控制功能[1,2]。
潜艇主机远控系统是潜艇主机的自动控制、状态监测和安全保护设备,是潜艇主动力系统的核心部件,它对潜艇动力系统的安全、可靠运行十分重要,关系到整艘潜艇的安全性,是保证潜艇在航率和完成战斗使命的关键因素。因此,无论是在设计制造阶段,还是在潜艇服役后的各等级维修阶段,都必须对潜艇主机远控系统的各项功能进行全面的测试,使其满足战技术要求。目前国内进行测试时只能采用人工操纵、经验判别的方式,过程复杂且工作效率低。这种测试方法已经跟不上现代装备维修保障工作的需要,更无法满足现代高新技术装备的测试要求[3]。有鉴于此,本文结合虚拟仪器的思想,研究了构建自动测试系统的具体过程,分析了实现过程中的关键技术,并研制出了某型潜艇主机远控系统的自动测试系统。
1测试需求分析和总体方案设计
1.1测试需求分析
根据主机远控系统的工作环境和测试工作的需要,所设计的自动测试系统应具有以下功能:
1)测试系统本身的自检自校能力。
2)程序化自动测试和人工辅助测试功能。
3)能提供被测设备及其部件正常工作和故障诊断所需的激励信号、模拟负载等环境条件。
4)能对主机远控系统进行功能检测和性能测试,测试结果应能直观地显示。
5)具有信号处理、故障分析、故障定位能力,故障点定位要尽可能具体、正确。
结合装备的实际情况[1,3],对自动测试系统进行设计时,应该遵循以下基本原则:
1)以满足部队作战需求、进步战斗力为基本目标,保障武器装备系统的质量和可靠性,进步可测试性和可维修性。
2)从军用武器系统的角度出发,在ATS各层次、全寿命各阶段坚持通用化、系列化、标准化的设计原则,降低全寿命周期用度、缩短研制周期。
3)应用模块化的商品及其技术,采用集成化的构造方式,确保系统的先进性、开放性、扩展性,保证测试系统本身的可靠性和长期稳定性。
4)应用人工智能技术,研究故障诊断理论和方法,进步故障诊断和隔离水平,建立有效的故障诊断系统。
1.2自动测试系统总体方案设计
自动测试系统的基本思想是:向被测对象送出测试矢量,接收对象在该测试矢量激励下的响应信息,再根据激励与响应之间的关系分析并“决策”和“产生”下一个激励信号,如此进行下往,最后对激励序列和响应序列进行分析和处理,判定被测试对象的功能是否正常,进而进行故障分析和故障定位。
在具体分析主机远控系统的工作原理的基础上,结合国内外自动测试技术的先进思想[4~6],根据测试需求,确定本文研究的自动测试系统的总体测试方案如下:
1)整机性能测试。针对控制系统整机的所有工作状态,仿真整个控制系统的所有输进信号,检测其输出信号,判定整机功能是否正常,如有故障,初步确定系统的故障性质与部位。
2)分机性能测试。根据各分机的工作原理和功能,仿真各分机的所有输进信号,检测其输出信号,判定各分机的功能是否正常。
3)故障设备的故障诊断。在工控机的控制下,根据需要向故障设备送出故障诊断激励矢量,通过采集关键电子元器件的响应信号,运用公道的故障诊断方法寻找故障源,将故障定位到回路,并尽可能定位到元器件。
2系统硬件设计
2.1远控系统硬件组成
潜艇主机远控系统由原动机远控装置、离合器保护和信号装置、电源和信号装置、原动机状态复示装置组成,各部分的连接关系及与潜艇上其它设备的连接关系如图1所示。虚线部分为潜艇主机远控系统。
远控系统各部分的主要功能如下:
1)原动机远控装置。在原动机处于远控状态时,完成原动机的盘车、吹车、启动、调速、正常停车、应急调节器停车、应急保护停车等功能,显示原动机的运行状态、报警信号、停机信号,并与离合器保护和信号装置一起对原动机进行安全保护。
2)离合器保护和信号装置。显示气动轮胎离合器的状态,接受全艇控制系统的信号并向其反馈信号,与原动机远控装置一起对原动机进行安全保护,并与电源和信号装置一起控制整个远控系统的工作状态。
3)电源和信号装置。将潜艇所供的电源处理后,根据远控系统的工作状态将电源分配到其它装置,并与离合器保护和信号装置一起控制整个远控系统的工作状态。
4)原动机状态复示装置。根据原动机远控装置中各量的状态对原动机的运行状态、报警信号、停机信号等进行复示。
图1远控系统组成及与其它设备的连接关系
图2自动测试系统硬件组成示意图
2.2自动测试系统硬件组成
虚拟仪用具有硬件少、体积小、重量轻、功能强、可扩充性强等优点。与传统仪器一样,虚拟仪器可以划分为数据采集与控制、数据分析与处理、结果表达与输出三大功能模块。结合虚拟仪器的思想[2,7],设计自动测试系统的硬件实现方案如图2所示。
图2中被测试对象是待测试的远控系统整机或者某一分机。电源电路向远控系统和信号调理电路供电,其中远控系统需要的是特殊的电源,需要购买专门的电源或者自行设计电源变换电路。
为了实现远控系统整机或分机的自动测试,需要为其设计专门的接口电路和信号调理电路,信号发生器、数据采集设备和被测试对象之间的所有信号都通过它传递,其主要作用有:①将信号发生器发出的信号(模拟量、数字量等)根据需要转换成远控系统所能接受的信号;②将远控系统产生的信号(模拟量、数字量等)转换成数据采集设备所能接受的信号。
信号发生器的主要作用是:在工控机的控制下产生相应的信号,经信号调理电路转换后送到远控系统,即产生激励矢量。
数据采集设备的主要作用是:在工控机的控制下,采集远控系统在激励矢量作用下的响应信号(经过信号调理电路转换),然后将信号送到工控机进行数据分析和处理。
工控机在软件的指挥下控制整个自动测试系统的运行,也是人机交互的主要途径,它根据需要控制信号发生器向远控系统发出激励矢量,同时将远控系统的响应矢量进行数据分析和处理,判定被测对象的功能是否正常并对其进行故障诊断,最后将判定结果及诊断信息通过显示设备进行显示或通过打印机进行打印。
3自动测试系统的软件设计
虚拟仪器的软件开发环境目前主要有两类:一类是文本式的编程语言,如VisualC++、VisualBasic、C++、LabWindows/CVI等;另一类是图形化编程语言,具有代表性的有LabVIEW、HPVEE等[8]。图形化编程语言和文本式编程语言相比,具有编程简单、直观、开发效率高的特点;而文本式编程语言灵活性较好,用户可以灵活的添加功能,而且比图形化编程软件开发本钱低。考虑到本自动测试系统有大量的信号仿真、信号检测、数据处理,而且需要有大量的图形界面处理,选择LabVIEW作为软件开发平台。程序框图如图3所示。
图3自动测试系统软件程序框图
图4自动测试系统主界面
系统开机后,首先进行测试系统本身的自检,如无异常,进进自动测试系统主界面,如图4所示。用户可以根据需要选择测试方案,测试方案分为以下三种:
1)整机功能测试。点击主界面上的“整机功能测试”按钮进进整机功能测试主界面。当控制系统的所有设备正常连接时,针对控制系统整体的所有功能(电源变换功能、信号指示功能、原动机控制功能、远控和保护功能),仿真模拟被控对象的工作过程,按照程序设置送给控制系统所需的输进信号,检测其输出信号,根据输进矢量和输出矢量之间的关系判定整机功能是否正常。假如功能测试不正常,则控制系统有故障,将故障定位到分机。
2)分机功能测试。在“分机功能”测试区点击分机名称按钮进进相应分机的测试界面。根据该分机的工作原理和功能,仿真模拟被控对象的工作过程和与其相联系的其它分机的耦合信号,按照程序设置送给该分机所需的输进信号,检测其输出信号,根据输进矢量和输出矢量之间的关系判定该分机功能是否正常。若不正常,则该分机有故障,视具体情况可以初步确定该分机的故障性质和故障部位。
3)故障设备的故障诊断。当通过“整机功能测试”或“分机功能测试”判定出某个分机故障时,就要对该分机进行具体的故障诊断。故障诊断时可以采用各种公道、先进的故障诊断方法搜寻故障的原因,尽可能将故障定位到元器件,进步故障诊出率,并尽量减少漏报和误报现象。本系统中采用以故障树分析法为主、模糊神经网络推理为辅的诊断方法。对故障设备故障树的构造,采取理论与实践相结合的方法,即在具体分析其工作原理的基础上,结合大量的人工诊断的经验,构造公道的故障树。故障诊断时,先将故障树结构存进计算机中,然后采取自上而下的方式进行故障搜寻和定位,测试时,工控机根据需要不断向故障设备送出故障激励矢量,同时采集关键电子元器件的响应矢量,根据激励矢量和响应矢量的关系进行故障定位。当需要辅助推理时,采用模糊神经网络推理方法,终极搜寻到故障的真正原因。当需要人工辅助时,软件会提示用户进行辅助测试,并提示人工辅助的方法。
4结论
本文具体分析了构建基于虚拟仪器的自动测试系统的各个环节,研究了实现过程中的关键技术。并以LabVIEW为开发环境,开发出了某型潜艇主机远控系统的自动测试系统,该自动测试系统能够实现远控系统整机和各分机的性能测试,并能够对故障设备进行具体的故障诊断。实际使用表明,该自动测试系统功能完善、界面直观、操纵简便、故障诊出率高。
本文作者创新点:
1)研究了将虚拟仪器技术应用于远控系统自动测试过程中的关键技术。
2)通过公道整合软、硬件资源,将上述技术应用于实际,研制出了某型远控系统整机和各分机的自动测试系统。
参考文献
[1]黄智刚.机载无线电设备自动测试系统关键技术研究[D].北京:北京航空航天大学,2002.
[2]GuiehuW..Virtualinstrumentsandtheirapplicationinexperiments[J].Proc.ofICEMI,1997:582-584.
[3]GJB2547-95,装备测试性大纲,1995.
[4]朱大齐.航空电子设备电子设备故障诊断技术研究[D].南京:南京航空航天大学,2002.
[5]L.EWang,K.C.Tall,X.D.Jiang,etal.Aflexibleautomatictestsystemforrotating-turbinemachinery[J].IEEETransactionsonAutomationScienceandEngineering,2005,2(1):1-18.
[6]邹明虎,王志云,高福生等.基于模糊神经网络的雷达印制板智能故障诊断系统研究[J].微计算机信息,2004,20(12):12-26.
[7]陈光禹,毛继宏,林春勋.现代电子测试技术[M].北京:国防产业出版社,2000.
[8]曹玲芝.现代测试技术及虚拟仪器[M].北京:北京航空航天大学出版社,2004.
上一篇:气体测量中的温压补偿应用
下一篇:全自动高性能电导率测量系统

