- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
光学测量光学测头的应用趋势
录入:edatop.com 点击:
传统的接触式三坐标测量机自1956年问世以来,已经经过了50多年的发展。目前已经广泛应用于生产车间及科研部门当中。随着工业技术的不断进步,对测量设备的各方面要求也不断提高,三坐标测量机在此过程中也经历了无数次的技术创新以适应更高的测量要求。尽管如此,当今三坐标测量机依然在某些方面遇到了一定的技术瓶颈。这些瓶颈的产生不能简单地归结于技术创新的不足,其主因在于接触式三坐标测量机的硬件结构和测量原理上的限制。
传统三坐标测量机配备最多的是触发式测头,用触发式测头测量物体时,测针以一定速度接触物体表面,从而使测针的位置产生偏离,产生的电信号触发测头记录一个物体表面测点的空间坐标。由此带来的第一个问题就是测量速度较慢。其原因在于,首先触发式测头的采点方式是非连续的,测头在一次采点完成后需退回一段距离,让测针归位后才能进行第二次采点。而且采点时接触物体表面的速度不能太快,若测针接触物体速度过快使得测针的位置偏离过大,则信号会被认为是发生了碰撞而采点失败。出于这个原因可以用扫描式测头代替触发式测头,扫描式测头采用的是连续采点方式,因此采点速度得到较大提升。限制测量速度的第二个原因在于,如果被测物体具有比较复杂的几何形状,那么测针需要变换若干次指向才能完成整个测量,并且测针的每个指向需进行标定。如果要克服这一不足,从而进一步提高测量速度的话,需要给三坐标测量机配备高端的多轴旋转扫描测头,该项新技术能够以连续方式高速扫描物体进行采点。
接触式测量所用的测针尖端一般为红宝石球,测头采点所得的空间坐标为红宝石球的球心位置。而测针与物体表面的实际接触位置并非球心,所以物点的坐标必须根据红宝石球的半径进行补偿。由此带来了接触式测量的第二个问题,即红宝石球的半径补偿方向错误。当被测几何特征较小(直径 《 1mm)且采点密度较大时,采得点的顺序会发生混乱,从而使球半径补偿方向产生错误,造成获得的几何特征与实际不符(图1)。

图1 叶片出气边的半径补偿错误
此外,由于物体表面存在一定不平度,同时红宝石球的直径要远大于表面不平度,导致测针无法测得物体表面的微小凹陷(图2)。
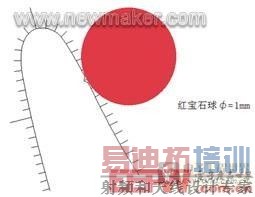
图2 红宝石球测针无法测得物体表面的微小凹陷
接触式测量的第三个问题在于被测物体的表面特性。如果被测物体表面比较柔软,或精细易损,则不适合使用接触式测头。当测针接触物体表面后,轻则使之发生形变,产生较大误差;重则损坏物体表面。
出于以上原因,光学测量与之相比就有着本质上的优势。光学测量作为一种非接触式测量方法,不使用接触式测针进行采点,而是利用了光的某方面特性来进行测量。这样就完全规避了红宝石球的补偿带来的潜在问题,也使被测物体表面不再受到测针接触带来的影响。至于测量速度则取决于光学测头的种类。但无论哪种测头,其采点方式都是连续的。而且在采点过程中,光学测头区别于接触式测头,接触式测头会因为接触物体表面时速度过快而被认为发生了碰撞,由于光学测头完全不会遇到这个问题,因此进一步提高了采点速度。
光学测头的分类方法有很多,种类更是繁复。从测量原理上通常可以分为共轴测量和三角测量;从光源属性上可以分为主动光源和被动光源;从光源维度上可以分为点光源、线光源和面光源;从光源色谱上又可以单色光源和白光源。共轴测量中常见的方法有两种。其一是干涉法,它利用了光的波长特性,将一束光通过平面分光镜(半透半反)分成两束。一束由镜面反射至参考平面,另一束则透射至被测物体表面。两束光经叠加后产生干涉条纹,干涉条纹的形式取决于物体的距离与物体表面的几何特征。另一种是共焦法,从一个点光源发射的探测光通过透镜聚焦到被测物体上,如果物体恰在焦点上,那么反射光通过原透镜应当汇聚回到光源,这就是所谓的共焦。在反射光的光路上加上了一块半反半透镜,将反射光折向带有小孔的挡板,小孔位置相当于光源。光度计测量小孔处的反射光强度,强度最大时物体即位于透镜焦点平面,这样即可测得物点的位置。三角测量则是利用了光源、像点和物点之间的三角关系来求得物点的距离。我们以点光源举例(图3):
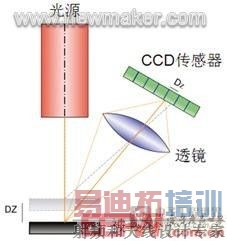
图3 三角测量示意图
光源向物体发射一个光点,光点到达物体后经过反射在
传感器 上得到一个像点;光源、物点和像点形成了一定的三角关系,其中光源和传感器上的像点的位置是已知的,由此可以计算得出物点的位置所在。有的测头以线光源来替代点光源,将一条由若干光点组成的光条纹投射到物体表面(图4),传感器上接收到的则是二维畸变光线图像,光线的畸变形状取决于每个物点的位置,这样的线光源测头可以大幅提高采点的速度。 [p]
上得到一个像点;光源、物点和像点形成了一定的三角关系,其中光源和传感器上的像点的位置是已知的,由此可以计算得出物点的位置所在。有的测头以线光源来替代点光源,将一条由若干光点组成的光条纹投射到物体表面(图4),传感器上接收到的则是二维畸变光线图像,光线的畸变形状取决于每个物点的位置,这样的线光源测头可以大幅提高采点的速度。 [p]

图4 将一条由若干光点组成的光条纹投射到物体表面
更有测头用光栅将一束光分散并编码,形成一定模式的结构光光源,这样在传感器上就可以得到一组畸变光线,从而进一步提高采点的速度(图5)。
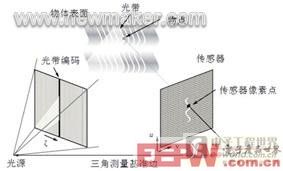
图5 测头用光栅将一束光分散并编码,形成一定模式的结构光光源
目前,各种光学测头采用的光源种类主要有激光和白光。激光作为一种准直、相干的单色光,广泛地作为点测头和线测头的光源。而白光则是由各种波长的光组成,因此颜色呈白色,目前较多地作为结构光光源。由于白光的物理特性,白光点测头也逐渐应用于测量领域中。激光和白光的最大区别在于,激光是一种单色光,因此拥有高度相干性,有些测头正是利用了激光的相干性来实现其功能;而白光是由各种波长的光组成,所以相干性相当微弱。如前所述,利用单色光的高度相干性可以根据某些原理进行测量,但事物的两面性同时说明,在有些地方相干性也会干扰测量。举例说明,激光测头利用物体表面的反射光进行三角测量时,照射到物体表面的激光会呈现颗粒状的结构,这种颗粒状的结构称为“散斑”,而这种现象称为“散斑效应”。散斑效应的产生,是由于激光照射在粗糙表面经反射造成的。大多数物体的表面与激光的波长相比都是粗糙的,因此当光波从物体表面反射时,表面各点都发出一束高度相干的子波,子波叠加的结果就形成了物体表面呈随机分布的散斑(图6)。

图6 子波叠加的结果就形成了物体表面呈随机分布的散斑
而白光由于由各种波长的光组成,因此相干性被大大削弱,所以在物体表面反射时,很难观察到散斑效应。这样的区别对于三角测量来说影响是十分巨大的。原因在于,三角测量是依靠像点在
传感器
上的位置来确定物点的空间位置的。而像点在传感器上通常不会是简单的一个点,反射光照射到传感器上使得一部分像素感光,计算机可以通过像素分析来确定这一群像素的中心,从而得到像点的位置。由于散斑效应的存在,使得要确定像点的位置变得非常困难,且误差较大。而分布均匀且对称的光点对像点位置的确定非常有利(图7)。这就是三角测量当中白光性能要优于激光的根本原因。
上一篇:气相色谱仪系列常见故障分类
下一篇:如何做简单的气相色谱配置

