- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
亚像素边缘检测在小模数齿轮参数检测中的应用
录入:edatop.com 点击:
摘要:针对工业中小模数齿轮参数检测高精密的要求,本文设计了一种改进的Sobel算子和三次样条插值法结合得到亚像素边缘检测的方法,以快速且精确的方式,得到二值化的边缘图像。通过对小模数齿轮图像边缘提取实验,对该算法的有效性和检测精度进行了验证,给出了实测尺寸对比结果。实验结果表明:本文的亚像素定位算法比传统算子检测定位精度更高,可满足图像高精度实时在线测量的要求。
引言
小模数齿轮具有成本低、重量轻、精度高、传动噪声小等特点,广泛用于家电、飞机、工业控制、汽车机械等领域。精密注塑的快速发展,使小模数齿轮的精密检测成为关键问题之一,传统的测量方法很难达到要求。目前国内外小模数齿轮测试的自动化程度低,测试仪器和平设备较少。图像检测技术具有非接触、高精度、高效率等诸多优点,在齿轮生产中,需要大量其直径、角度、尺寸等指标,因此将图像检测技术应用于小模数齿轮有重大意义。
在图像测量领域,被测件有关边缘点的定位精度往往直接影响到整个测量的精度。因此,要提高齿轮检测的精密度,关键在于研究齿轮图像的边缘检测和精确定位方法。小模数齿轮齿槽空间小、轮齿刚度差、易变形,这要求检测的精度非常高,有的要求精确到μm级别。这就为图像测量技术带来了挑战,传统的边缘检测技术只能精确到1个像素点,这显然很难满足对检测精度越来越高的要求。因此,本文提出一种基于改进的Sobel算子和三次样条插值结合的亚像素边缘检测方法,能达到亚像素级并且具有较好的抗噪声能力。
Sobel算子边缘提取
传统的Sobel算子
Sobel算子是一种经典的微分边缘检测算法,它计算简单,且检测效果较好,能平滑噪声,可提供较为精确的边缘方向信息。
Sobel算子只检测水平方向和垂直方向的亮度差分值,其经典的3×3的邻域模板图1所示:

Sobel算子很容易在空间上实现,Sobel边缘检测器能产生较好的边缘效果,而且受噪声影响较小。
改进的Sobel算子
由以上分析可知,虽然Sobel算子简单、快速,但由于只采用了2个方向的模板,这种算法用来处理纹理较为复杂的图像时,其检测的边缘效果就不是很理想了。为了弥补此类不足,本文对Sobel算子进行了改进,将算子模板扩展到了8个模板,其算子模板如图2所示。
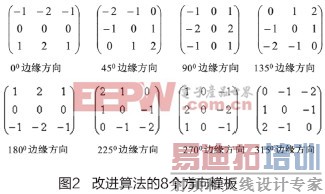
经过8个方向模板的计算,对某一幅图像进行逐点计算,并且取最大值为像素点的新灰度值,通过阈值的设定,判断边缘点。最大值对应的模板所表示的方向为该像素点的边缘方向。
为了克服Sobel算子检测的边缘较粗,得到的边缘象素往往是分小段连续,梯度幅值较小的边缘容易丢失的缺陷,本文对S(i,j)引入一个衰减因子D,用它去除计算的结果,即:
![]()
因此,用处理后的所得到图像与Sobel算子直接对原始图像进行边缘检测的图像相加,这一步显得尤为重要。可有效改进算法的精度。
亚像素边缘检测
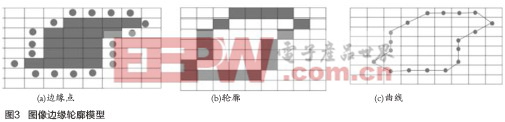
传统的基于边缘跟踪算法定位精度一般为1个像素(包括以上改进的Sobel算子),其定位原理如图3所示。显然,检测的面积与物体几何轮廓有明显差距,对于数字图像,每个像素坐标均为整数,得到边缘点可能不太精确,因此本文中提出一种亚像素边缘定位算法,其定位的核心即如何更精确地估计边缘点坐标。
三次样条插值
改进的Sobel算子检测得出的是像素级的边缘,为了获得亚像素级的边缘,就要对边缘图像再进行精提取。考虑到要满足在线检测的要求,检测速度要越快越好,本文采取处理速度相对较快的对灰度边缘图内插处理方法。插值方法中,三次样条插值法得到精度高,所以本文采用三次样条插值法对灰度边缘图进行插值处理。
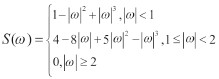
三次样条插值定义[4]如下:
若函数S(x)满足:(1)S(x)在每一个子区间[xi-1,xi] (i=1,2,…n)上都是不高于三次的多项式,其中![]()
![]()
(2)S(x),S′(x),S″(x)在[a,b]上连续。
(3)满足插值条件S(xi)=f(xi) (i=0,1,…,n),那我们就称S(x)为函数f(x)关于节点x0,x1,…,xn的三次样条插值函数。其数学表达式如下
 (2)
(2)
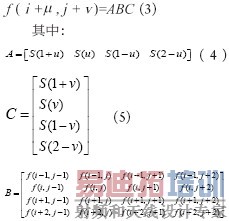
具体的实现方法是考虑一个浮点坐标(i+μ,j+v)周围的十六个邻点,目标像素点c的值![]() 可通过以下的插值公式得到:
可通过以下的插值公式得到:
 (6)
(6)
最大类间方差法(Ostu)
对插值得到的图像再进行二值化,就可得到图像边缘信息,其中阈值的选择是关键。这里采用最大类间方差法来自动产生阈值。该方法具有简单、处理速度特别快的优点,是一种常用的阈值选取方法。其基本思想是:假设图像像素数为N,灰度变化范围为[0,L-1],对应灰度级i的像素数Ni为几率为:
![]()
![]()
以阈值T为基准,把图像的像素按灰度值划分为两类C0及C1,其中C0的灰度值低于T,即在[0,T]之间的像素组成;其中C1的灰度值低于T,即在[T+1,L-1]之间的像素组成。
考虑到像素灰度的分布几率,整幅图像的均值为:

 (13)
(13) 让T在[0,L-1]范围内依次取值,使得![]() 最大的T值则为Otsu算法的最佳阈值。
最大的T值则为Otsu算法的最佳阈值。
实验结果及分析
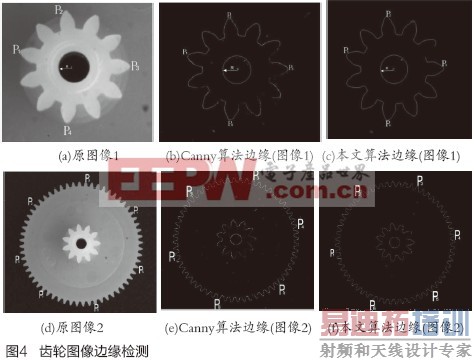
本文中以小模数塑料齿轮图像为原型,通过实验比较本文算法与传统Canny算子所做检测结果,且以专业检测仪器所测结果对比。
由图(b)与图(c)、图(e)与图(d)可看出,亚像素边缘更清晰,定位精度也更高,优于传统的边缘检测算法。
表1、表2为两种算法的数据对比,可见本文算法在精度上有明显的优势。

结论
本文设计了一种亚像素级边缘算法,并与传统边缘检测算子,Canny算了作了实验结果比较,实验结果表明,该方法能精确定位图像边缘,优于传统方法的边缘检测方法,能更好的检测齿轮图像的特征,对齿轮检测有新的进步。
参考文献:
[1] 刘洲峰,王鹏飞.基于Canny算子的多尺度小波变换图像边缘检测方法[J].电气自动化,2009,31,(2):63-65
[2] 王文成.基于机器视觉的齿轮参数测量系统设计[J].机械传动,2011,35,(2):41-43
[3] 韦炜.常用图像边缘检测方法及Matlab研究[J].现代电子技术,2011,34,(4):92-94
[4] 张丰收,王飞,崔凤奎,刘建亭.一种基于梯度的亚像素边缘检测算法[J].微电子学与计算机,2011,28,(3):102-106
[5] 孙红艳,张海英.图像边缘检测算法的比较与分析[J].菏泽学院学报,2010,32,(2):49-52
[6] 陈少平,张桂梅,王斯财.基于小波变换和Canny算子的齿轮边缘检测[J].失效分析与预防,2010,5,(4):199-203
[7] 董静,王正勇.Zernike矩结合Sobel算子的边缘检测[J].信息与电子工程,2011,9,(2):202-205
上一篇:用于高速旋转MEMS微引擎动态特性研究的光学测量技术进展
下一篇:洛氏硬度(HRC)、布氏硬度(HB)等硬度具体区别和换算

