- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于DSP捕获单元的柴油发电机组的转速测量系统
录入:edatop.com 点击:
1 引言
应用于高层建筑、银行、机场和油田等场合的柴油发电机组,必须采用相应方法控制其供电电压和频率,以确保在机组运行中具有良好的电气性能,满足应用要求。其频率控制一般是通过转速控制实现,目前应用较多的为模拟式转速调节器。由于模拟式调节器不易实现复杂控制规律、结构复杂。故采用数字式控制器。数字式控制器具有算法灵活.可实现复杂控制规律、抗干扰能力强等特点,是实现柴油发电机组转速的高精度调节的理想选择。因此,这里提出了一种以TMS320F2812 DSP为核心的转速数字控制器的测速功能系统设计.该设计方案是进一步实现转速数字控制的基础。
2 转速测量原理
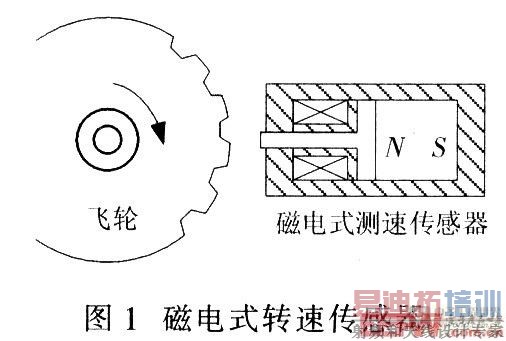
在测量和控制柴油发电机组转速时,需用转速传感器检测机组转速.柴油发电机组经常使用磁电式转速传感器(图1),该转换传感器是在永久磁铁上安装一感应线圈.并将传感器安装于柴油机飞轮附近.与柴油机的测速飞轮构成一个磁回路。当柴油发电机组转动时.由于飞轮带有齿槽,就会使回路磁阻发生变化,从而在转速传感器的线圈中产生感应电势,即转速电压信号,转速传感器线圈输出的平均电压值为0.5~6 V,其频率为:
f=Zn/60 (1)
式中:Z为柴油机飞轮齿数,n机组转速。
将传感器输出信号调理后变成速度频率的数字信号输入TMS320F2812 DSP的捕获单元,捕获被测信号电平的跳变沿(比如上升沿),从而可在被测信号的一个周期内,对标准时钟f0的周期数计数,若得到的周期数为K,则显然被测信号的周期(T)可表示为:
T=K/f0 (2)
于是,由(1)式和(2)式可得柴油发电机组的转速为:
n=60f0/ZK (3)
通过DSP程序按(3)式即可计算机组转速。
3 转速测量系统设计
3.1 硬件电路设计
若飞轮齿数Z为159,柴油机额定转速为1 500 r/min,根据上述测量原理,给出以TMS320F2812 DSP为核心的转速测量系统的硬件设计,如图2所示。
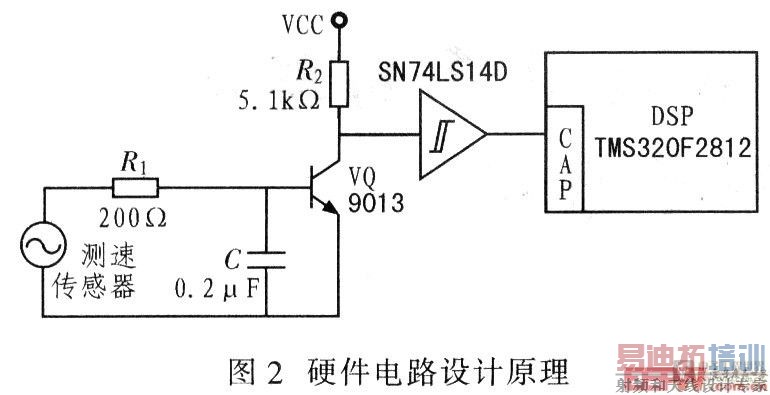
磁电式转速传感器的输出信号首先由R1和C组成的滤波电路滤波,其截止频率fc根据柴油机在额定转速时传感器输出信号的频率确定,而因fc=l/(2πR1C),从而确定R1和C,可见这两者的取值与柴油机转速和飞轮齿数有关。需要注意的是这两者取值应按实际设备参数确定。传感器输出模拟信号,要送入DSP需将其转换为数字信号,因此采用VQ开关状态,经VQ转换后其集电极输出信号需由反相施密特触发器变换后(即经过信号整形后)再送入DSPTMS320F2812的捕获单元CAPl。该捕捉单元有一个专用的2级深度FIF0堆栈.顶层堆栈由CAPI FIF0组成,底层由CAPlFBOT组成。测速分两次捕捉.第一次捕捉到引脚发生的指定变化时,捕获单元将捕捉所选用计数器的计数值并把该值写入FIF0堆栈的顶层寄存器.如果在第一次捕捉的值读取之前发生第二次捕捉.新的捕捉值会被送入底层寄存器。捕获单元捕捉到数值后.相应的中断标志位置1,如果没有屏蔽中断,则产生外围设备中断请求。响应中断,通过中断服务程序读取一对捕捉的数值。该捕捉值正好是被测信号一个周期的两次计数。根据这两次捕获值,计算标准时钟的周期数K,进而得出被测转速。
3.2 软件程序设计
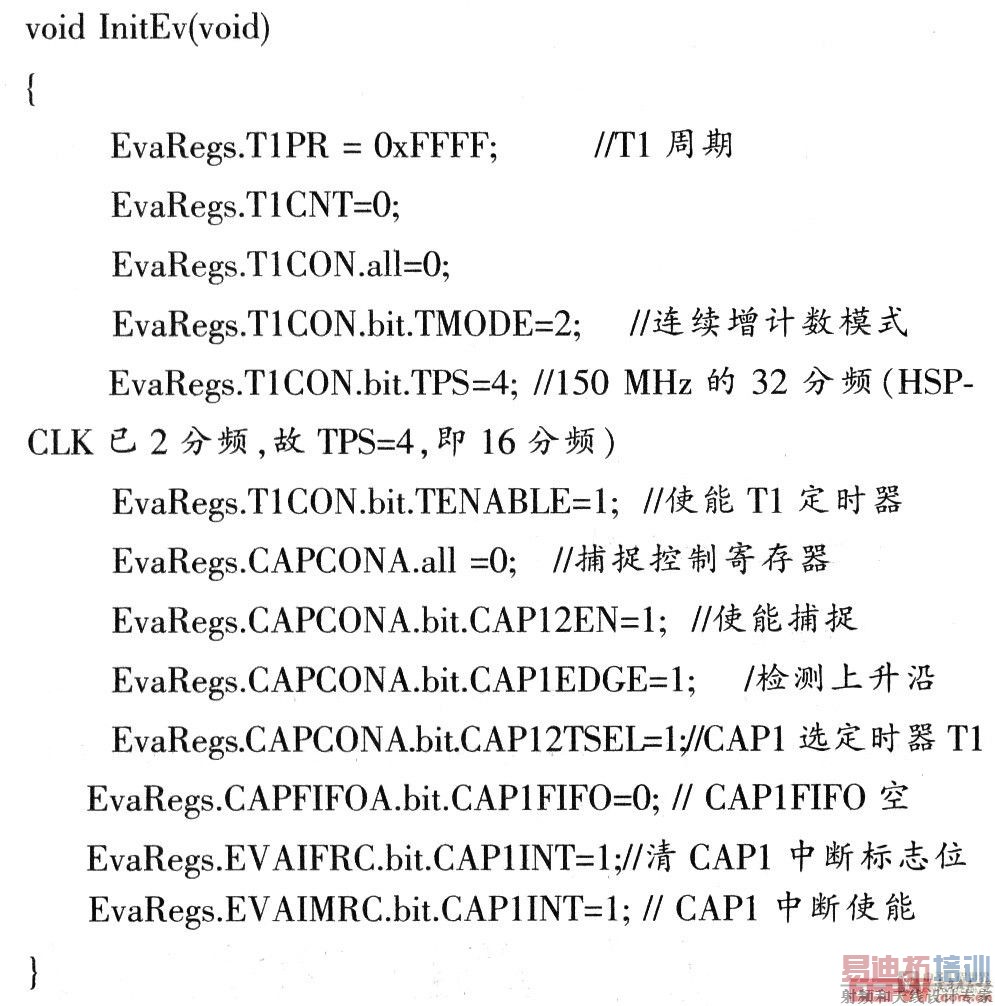
由于采用DSP的事件管理器EVA的捕获单元CAPl,并选其定时器T1作为CAPl的时间基准,T1工作在连续递增计数模式,并设定捕获单元捕获被测信号的上升沿。捕获前要清中断标志位,开捕获中断。相应初始化事件管理器EVA的程序代码为:
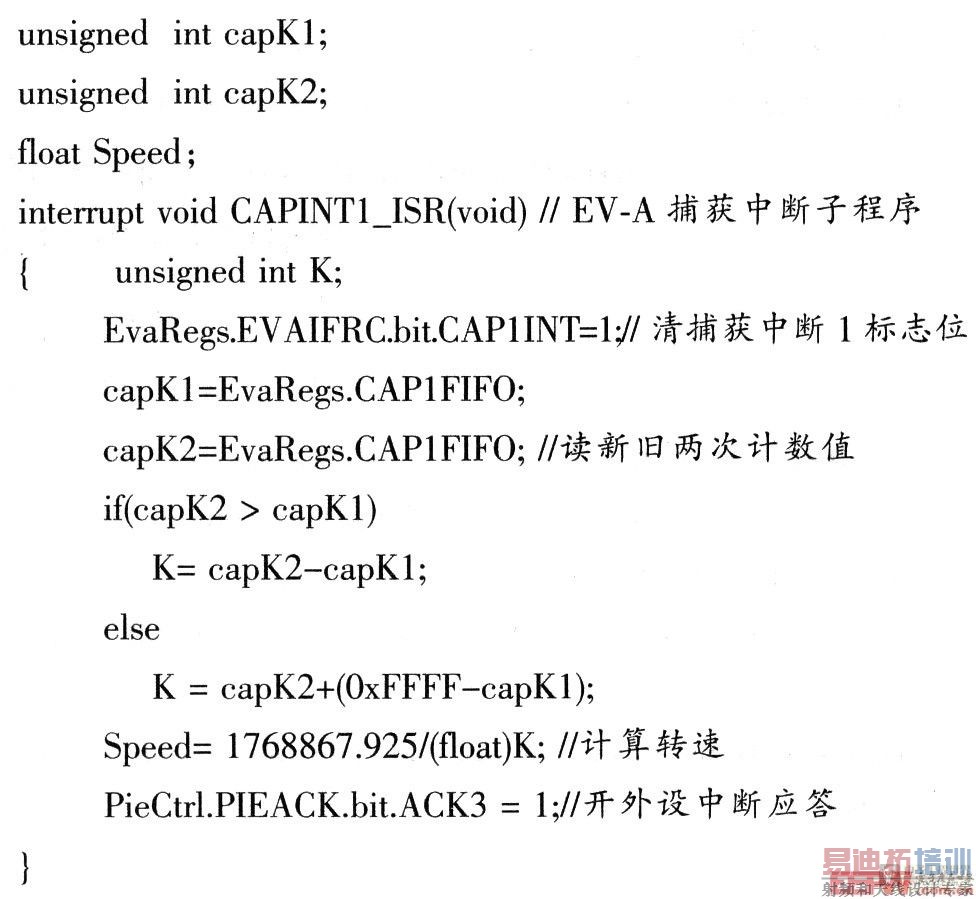
进入捕获中断子程序时,保护现场首先清CAPl中断标志位,从二级深度FIF0中依次读取两次捕获的计数值capKl和capK2。如果capK2>capKl,则capK2一capKl即为在被测信号的一个周期内记的标准时钟的周期数K。若capK2capKl,则说明在计数过程中有计数溢出,即计数到周期寄存器T1PR内写入的OxFFFF后回零重新计数,因此K=capK2一capKl+0xFFFF。这里时基T1的频率为主频时钟除以分频系数,即f0=150 MHz/32,因此所测速度为n=60f0/(ZK)=1768 867.925/K。下面为捕获中断子程序代码:
4 结语
基于磁电式转速传感器和TMS320F2812 DSP的捕获单元实现的柴油发电机组转速数字控制器的转速测量系统,其硬件设计简单,测量精度较高。经实验测试,在机组转速80~1500 r/min时,测量误差均低于0.2%,完全满足柴油机发电机组转速测量和控制的要求,有较高的实际应用价值。
上一篇:详解遥测型的测试器原理
下一篇:运用数字
像处理技术可实现型坯直径的实时在线检

