- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
采用MSC.ADAMS 软件对一款汽车空调压缩机进行运动
录入:edatop.com 点击:
引言
随着人们生活水平的提高,对汽车舒适性的要求也越来越高。汽车空调的质量影响到对整车的评价。由于汽车是直接暴露在太阳或风雪下,而且汽车行驶的速度变化无常,车内的空间有限。这都加大了汽车空调的设计难度。一般来说汽车空调由压缩机,冷凝器,蒸发器,和膨胀阀组成。汽车空调压缩机是汽车空调的关键零部件,也是主要的运动部件。采用虚拟样机技术可以研究汽车空调压缩机的运动规律和动力性能,为设计和优化提供帮助。
虚拟样机技术是在产品的设计开发中,将分散的零部件设计和分析技术融合在一起,在计算机上建造出产品的整体模型,并对该产品在投入使用后的各种工况进行仿真分析,预测产品的整体性能,进而改进设计,提高产品质量。
本文是采用MSC.ADAMS 软件对一款汽车空调压缩机进行运动,动力分析,从而了解其运动规律,并计算一些联接副的受力情况。
1 汽车空调压缩机运动机构概述
汽车空调压缩机可分为往复式和旋转式二大类。往复式的又分曲轴连杆式,轴向活塞式,和径向活塞式。其中轴向活塞式又分旋转斜盘式和摇摆斜盘式。旋转式又分刮片式,滚动活塞式,三角转子式,涡旋式,螺杆式。本文主要研究5 缸摇摆斜盘式的汽车空调压缩机。
摇摆斜盘式的汽车空调压缩机的工作原理是通过主轴的旋转带动斜盘的转动,通过只能进行摆动的行星盘将旋转运动转化为活塞的往复运动,活塞在气缸里对制冷剂进行压缩。(见图1)

图1 空调压缩机核心部件装配图
2 摇摆斜盘式压缩机运动学几何关系
摇摆斜盘式压缩机通过主轴带动斜盘作圆周运动,行星盘由于导向杆的运动约束,将主轴的周转运动转化为斜盘表面质点的轴向往复,并通过连杆带动活塞,构成空间上类曲柄滑块机构。
本模型中,由于受到行星盘上导向杆的约束,活塞3 的连杆连接行星盘一端的球心始终位于轴线与导向杆轴线所确定的平面内,该活塞的运动处于较为特殊的地位,几何关系为平面运动。其余活塞1,5,活塞2,4 互为对等关系,且均属空间运动学范畴。
3 活塞运动学公式推导
在研究压缩机时,活塞的运动规律十分重要。下面以活塞3 为例,对压缩机的活塞质心运动进行公式推导。
如图2 所示,对该几何关系构建封闭矢量多边形,l1、l2、l3、s4 均为相应的杆矢量,θ1、θ2、θ3、θ4 为杆件的方位角,各杆件矢量方向不影响计算结果,但方位角均应由x 轴开始,并以沿逆时针方向计量为正。
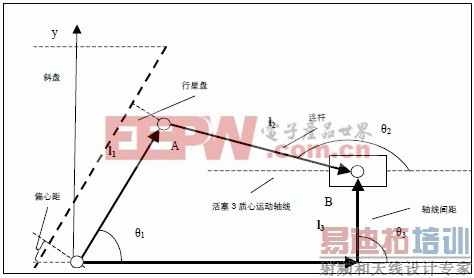
图2 活塞3 运动几何关系
由于主轴轴线(即斜盘轴线)和行星盘轴线各自在工作结合面(粗虚线)上的交点有一偏心距,其偏置的结果正好使得行星盘中心球状腔的球心(O 点)落在了主轴轴线(X 轴)上。
所以,在固定球轮的顶压下,行星盘完全绕O 点作摆动,行星盘中心孔腔的球心(O 点)到圆周孔腔(即连杆球铰链落位处)的球心(A 点)之间的距离为曲柄长度,连杆两球心之间距离为连杆长度,活塞质心运动状态等效B 点(球铰链球心)运动状态。
由于在封闭矢量多边形中,各矢量之和为零:


4 通过MSC.ADAMS 对压缩机进行运动动力分析
4.1 分析的基本步骤
汽车空调压缩机的仿真过程如下:1. 运用UG 的三维实体建模模块对压缩机核心运动机构进行三维建模,主要包括主轴、斜盘、行星盘、连杆和活塞五大部件,并在UG 环境下进行装配。2. 将建好的实体模型以Parasolid 格式输出,导入ADAMS 中,添加材料属性,并根据默认位置关系附加运动约束,实现模拟运动无干涉。3. 根据三种给定的不同工况,计算活塞端面的气体压力,将气体力学方程导入,完成力学约束的添加。4. 根据工况,在驱动轴上赋给指定转速,输出动力学特性曲线,包括活塞质心位移曲线、活塞质心速度曲线、活塞质心加速度曲线和活塞端面力曲线。并对获取的数据进行动力学分析。
4.2 零部件的物理参数
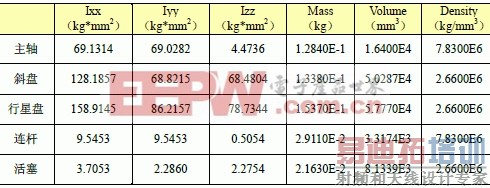
其几何参数和惯性参数采用三维CAD 实体建模软件UG-Ⅱ计算得到,如表1 所示。这对几何形状极不规则,采用计算方法很难得到准确数值的物体,如斜盘等,将大大简化计算过程。
表1 空调压缩核心部件力学参数
4.3 约束的选定
在ADAMS 的VIEW 模块对模型中的零件之间的运动副进行约束定义。下表为运动副的约束定义。
表2 空调压缩核心部件运动约束

4.4 确定边界条件(活塞压力的确定)
4.4.1 仿真工况:
按试验要求,如表4.2.3-1 所示,仿真过程将在900rps、5500rps、7000rps 三种转速及各自相对应的吸气压强、排气压强下进行测试。
表3 空调压缩机试验工况

4.4.2 活塞顶部压力公式推导:
根据气体方程:多变过程的 P*VN=C 得出:
压缩过程:P1=Ps*((L+C)/( .5H11G.cm_dis+d3+C)) N
排气过程:P2=Pd
膨胀过程:P3=Pd*(C/(.5H11G.cm_dis+d3+C)) N
吸气过程:P4=Ps
其中:
L=压缩机平均行程
C=余隙
N=多变指数
d3=活塞下止点平均位置
.5H11G.cm_dis=活塞质心点位置[p]
[p]
5 分析结果
5.1 运动学分析
在转速为900rpm、吸气压强为0.358Mpa、排气压强为2.97Mpa 的工况下,如图7 和图8 所示,由于正五边形的对称性,所有活塞的位移幅值和端面受力曲线基本一致,相位差为2π /5。
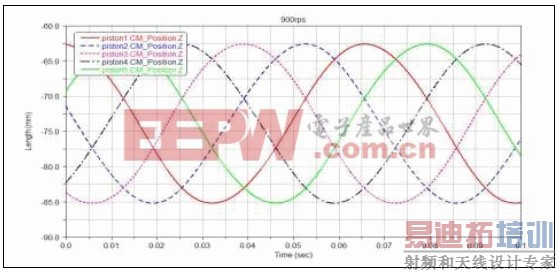
图7 活塞位移曲线(900rpm)
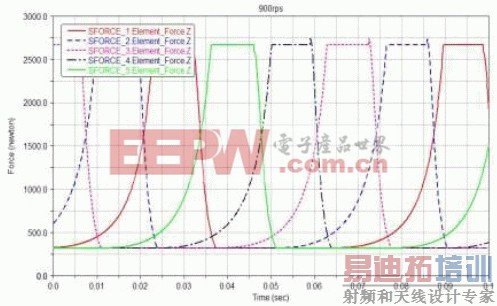
图8 活塞压力曲线(900rpm)
在活塞端面受力曲线中可以很明显的看到两段压力恒定的直线,对应了压缩机工作中的吸气和排气状态(上端为吸气,下端为排气),两段曲线则分别对应了膨胀和压缩状态(左端为压缩,右端为膨胀),和上文利用速度方向和活塞质心位置判定结果一致。
由于导向杆的约束所带来的对称性,使得靠近导向杆轴线的活塞(1 和5),其速度幅值要略大于远离轴线的活塞(2 和4)速度幅值,如图9 所示。导向杆所带来的对称性在加速度曲线图中尤为明显,如图10 所示,且处于对称轴线上的活塞3 的加速度曲线变化平稳而光滑,远离轴线的活塞(1 和5)的加速度曲线则出现了一定的畸变,加速度的峰值相对原相位出现了超前或滞后的现象。

图9 活塞速度曲线(900rpm)
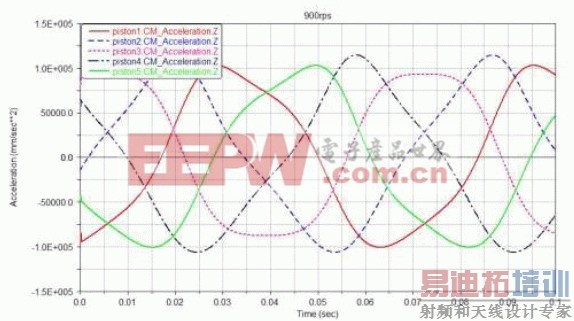
图10 活塞加速度曲线(900rpm)
出现这种情况在很大程度上是由于导向杆的运动约束造成的“轴对称性”而非理想状态下的空间对称性,五个活塞在机构上并不处于完全对等的地位所致。在满足了五个活塞在周向位移的要求的同时,因为连杆与行星盘的球铰链球心有不同程度的空间运动,使得速度和加速度的传递出现了不同的结果。
5.2 动力学分析
通过分析可得导向杆头部的受力情况(图11)和压缩机的功耗(图12)。通过导向杆的受力曲线我们可将其作为有限元分析的边界条件,分析其应力,应变,和疲劳。
通过将模拟所得的功耗同实际情况的功耗进行比较,按标准在该工况下功耗应为2.75KW,同模拟所得的曲线平均在2.7KW 是相当接近的,从而也可证明分析的精度是非常高的。
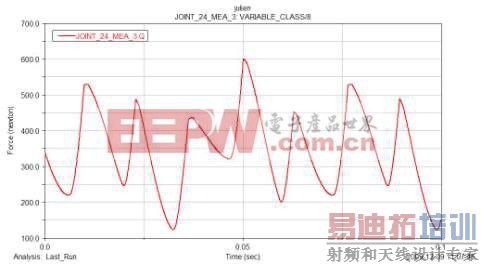
图11 导向杆头部受力曲线

图12 压缩机功耗曲线
6. 结语
通过分析,我们发现理论公式推导,和试验数据同软件运动学动力学仿真所得数据能达成较好的一致性。这说明前期三维实体建模和实体模型上的力学模型搭建的正确性,并进一步验证了软件动力学仿真的可行性。这不仅节省了大量的人力物力资源,更重要的是缩短了产品设计周期以减短了产品的生产制造周期,提高了优化设计的便捷性,降低了成本。

