- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于小波变换的视频应变测量系统设计与实现
录入:edatop.com 点击:
引言
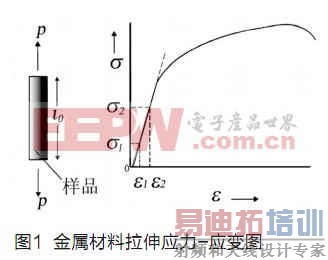
应变是材料测试中的重要参数,材料力学的一个重要研究领域是通过建立材料的应力-应变关系如图1,研究和预测材料的力学行为[1],所以应变的获取关系到是否能正确和有效地构建材料的本构方程。在实验力学中,应变并非直接测量,它是通过对材料绝对变形测量后再按照相应的应变定义计算得出。
实际中通常采用机械式引伸计夹持在工件上,对工件施加载荷的同时进行测量。对于刚性材料,应变一般可以使用传统的机械夹持式引伸计进行测量。然而,这类装置对诸如纤维、薄膜、泡沫等软塑性材料的工件就无法使用,因为它们的重量和夹持方法都会影响试验结果与断裂点。在实际情况下,需要测知超大应变范围直至断裂的材料性能,受行程限制,机械式引伸计需要在试件断裂前提下,对于一些特定环境条件下的工件,例如高温条件,机械引伸计使用也会受到限制。
为减少测量误差、提高测量的精度及提高实际的适用范围。在材料拉伸试验的背景下,设计并采用视频应变测量系统间接测量材料拉伸试验中实时变化的应变。该应变测量系统既要满足试验的测量精度,又要保证测量的实时性。文中在材料拉伸试验应变测量的精密边缘检测算[2,3]法进行了深入研究,在成熟的小波变换理论下,创新地将小波变换期望亚像素算法应用于视频应变测量系统设计中。
小波变换期望值亚像素定位法
小波分析是一种多分辨率分析[4],能在时域和频域突出信号的局部特征,现已广泛应用于去噪和边缘检测等图像处理领域。
小波变换边缘检测原理
一维小波函数表示如下:

图像函数f(x)在小波尺度a下的小波变换由卷积运算得到:

对于某些特殊的小波函数,小波变换的模极大值对应信号的突变点。设是一个平滑的函数,定义为的一阶导数:

记作,则在小波尺度a下的小波变换就为:

小波变换正比于被平滑的函数f(x)的一阶导数,则的极大值对应的是导数的极大值,它也正是在小波尺度a下,信号的局部突变点。因此,小波变换模极大值检测可应用于图像的边缘检测[5]。
小波变换期望值亚像素定位法原理
设一维理想边缘模型为:

其中,
对实际的成像系统,由于CCD是积分器件,它的输出灰度值与其感光面上的光强分布相关。设G(x)表示成像系统点扩展函数,其通常可用高斯函数近似表示:

成像系统所获取的理想边缘无噪声图像为:

其中:x0为边缘图像的准确位置。
[p]设wf1(a,x)表示,在小波尺度a下的小波变换系数,p(x)为大于给定阈值T的小波变换系数概率。推导经CCD成像(含实际噪声)后边缘图像的准确位置。

期望值即是理想边缘经成像系统所得实际图像边缘的准确位置。
对于离散信号,设是图像边缘信号的小波变换系数,为大于给定阈值T的概率,E是阶跃边缘位置x的期望值,则有:
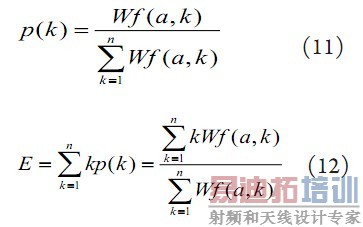
由此得到的小波系数期望值E即为图像边缘的准确位置。
小波变换期望值亚像素定位法求解步骤
小波变换期望值亚像素边缘检测具体定位步骤如下:
1)选择一个小波尺度a,对给定的数据执行小波变换;
2)求出在小波尺度a下的小波变换系数的模极大值;
3)滤除由噪声产生的,小波变换系数中随小波尺度a的增加而减小的模极大值;
4)给定一阈值T,滤除由噪声与微小细节生成的模极大值;
5)在模极大值附近,寻找和模极大值同符号的小波系数区间,该区间内的小波变换系数由式(12)求期望,所得期望值即是图像边缘的亚像素位置。
理论可证明,小波变换边缘检测定位法不存在原理误差,同时具有较强的抗噪性能。有关试验已表明,在对光源等环境条件没有特殊要求的情况下,其边缘定位检测的精度能够在0.02个像素以内[5],验证了理论的正确性。另外,小波变换期望值边缘检测亚像素定位法是建立在信号小波变换基础上的,而Mallat方法的提出,使得小波变换的速度大大提高[4],因此小波变换期望值边缘检测亚像素定位法,无论是在其精度、抗噪性能还是速度等方面,都已有比较优越的性能。
[p]测量试验与结果
试验设备及系统软件设计
试验硬件:CCD——德国Basler A601f;镜头——Computar公司的H6Z0812镜头;图像处理卡——Matrox公司的Meteor-Ⅱ/1394卡;光源——自制的LED面光源。试验过程中采用材料试验机进行动态拉伸试验。所使用的材料试验机具体参数为:力测量精度在负荷传感器容量的0.4%~100%范围内,精度为示值的±0.5%;位移速度精度优于±0.5﹪(空载、检测距离大于20mm)。试验设备如图2所示:
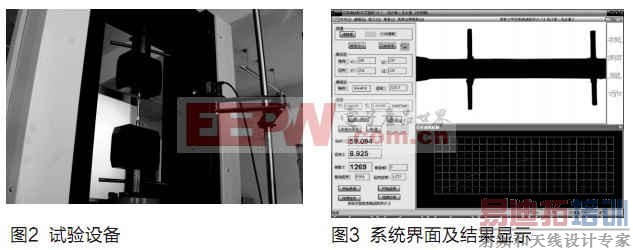
在Windows XP操作系统下,利用Visual C++高级语言编制系统软件[6,7],实现算法操作,系统界面及显示结果如图3。
根据试验数据的精密度评定方法,在试验中,得到的测量值M由真值T与实验误差δ两部分组成,即M=T±δ。真值是未知的,一般采用多次测量求算术平均值作为其真值。

采集频率对系统算法实现的影响
视频应变测量系统应用于动态图像测量,因此需研究影响系统数据结果的时间因素,即分析不同采集频率对小波变换期望亚像素算法精度的影响。
试验条件:三角架放在试验机上,固定摄像机,距试件大约200mm附近,具体距离根据工件图像清晰程度调节,装置如图2所示,用引伸计作为标记。打开试验机,开始试验,动横梁向下移动,选定横梁移动速度约3mm/min,工件进入拉伸试验阶段,摄像机采集试验数据,进行分析计算。具体试验参数如下:试验机拉伸速度3mm/min;光照度726LUX;物距192mm;测量标距50mm;光圈5;焦距14。
1、采集频率15帧/秒
在图4为在相机采集的数据中,把帧数换算为时间,与试验机采集的时间相匹配作为横坐标,纵坐标为变形值,虚线是引伸计采集数据,实线是相机采集的数据。
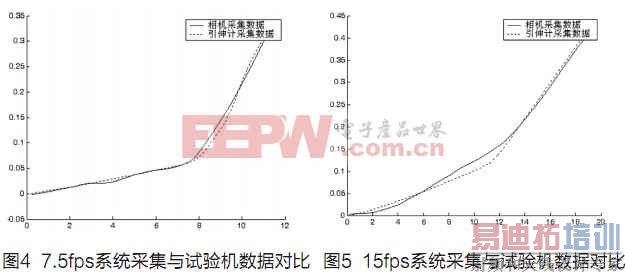
当采集频率7.5帧/秒时,相机采集数据与引伸计采集数据的平均误差为:
![]()
2、采集频率15帧/秒
同上处理得出,当采集频率15帧/秒时,相机采集数据与引伸计采集数据的平均误差为:
![]()
3、采集频率为30帧/秒
采集频率30帧/秒时,相机采集数据与引伸计采集数据的平均误差为:
![]()
通过对视频应变测量系统数据结果在不同图像采集频率下的分析,可以得出在光照、物距、焦距等外界因素不变的条件下,随着相机采集频率(7.5帧/秒、15帧/秒、30帧/秒)的提高,数据误差会随着增大。但该系统在30帧/秒情况下,可以满足一定的误差要求,而不至于误差过大,使得测量结果不精确。

结语
本文所设计的基于小波变换视频应变测量系统,精度较高,且具有一定的实时性要求,能够满足实际的需要。随着电子技术、机械科学、光学和计算机科学技术[8]的发展,应用于视频应变测量系统的精密边缘检测技术,将会有长远的发展。
参考文献
[1]聂毓琴,孟广伟.材料力学[M].长春:吉林科学技术出版社,2000.
[2]于起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科学出版社,2002.
[3]张学成,杨敏华,张英杰.灰度矩边缘精确定位法的测量应用探讨[J].计算机测量与控制,2006,14(11):1446-1449.
[4]李弼程,罗建书.小波分析及其应用[M].北京:电子工业出版社,2003.
[5]丁兴号.基于小波变换的亚像素边缘检测[J].仪表仪器学报,2005,8(26):801-804.
[6]David J,Kruglinski.Visual C++技术内幕[M].北京:清华大学出版社,1999.
[7]甄红涛,齐晓慧.一种非均匀行采集的智能车路径识别算法[J].电子产品世界,2010,11:27-30.
[8]盖素丽.基于CPU的数字图像并行处理方法[J].电子产品世界,2009,2:38-40.
上一篇:eyeMario
–
利用眼球运动控制电子游戏
下一篇:符合EMI/EMC标准的SerDes――基本测试策略和指南

