- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
移动定位技术的现状与发展趋势
录入:edatop.com 点击:
0 引言
移动定位技术已经与紧急救援、医疗、航海等方面息息相关,在服务于大众日常生活的同时,也为国家在某些领域带来极大的便利。FCC(美国通信委员会)对E911的提出促进了LBS(Location Based Service)的发展,同时近年来互联网的高速发展在某种程度上加快了移动定位的发展。尽管如此,定位精度还远远不能满足需求。不过可喜的是,当下互联网、物联网等的高速发展,以及全球化的定位系统,比如我国正在自主发展、独立运行的全球导航系统——北斗卫星导航系统(BeiDou Navigation Satellite System)、美国军方研制的GPS(Global PositioNIng System)、俄罗斯的格洛纳斯GLONASS(Global Navigation Satellite System)、欧盟的伽利略(Galileo Position-ing System)等,说明定位技术在一个地区,乃至全球有着举足轻重的作用。
目前,网络、终端以及多种技术相互结合成为移动定位的技术主流。 在移动定位方面主要的工作是提高定位的精度,不断改进原有技术以及对新技术的研发,如对室内定位目前所存在的技术上的欠缺,是当下亟待解决的问题。在移动定位技术方面,已经基本上能够满足广大用户的需求,各种定位技术相互借鉴,扬长避短,定位精度日渐提高。
1 移动定位性能指标
评价移动定位性能的优略,主要对定位精度、响应时间、定位复杂度等进行评价。
1.1 定位精度
定位精度是指空间实体位置信息坐标与真实位置坐标之间的差异,是定位性能最重要的指标。
(1)MSE与RMSE
其中,(x,y)为真实坐标位置,(x′,y′)为空间实体位置坐标。
(2)克拉美罗下界
克拉美罗下界(CRLB)对无偏估计规定了下界。用MSE或者RMSE对CRLB的逼近程度进行判定。
(3)累积概率函数
累积分布函数(CDF)是对概率密度函数(PDF)的积分,表征在某个范围内随机变量所能发生的概率。
(4)圆(球)误差概率
圆(球)误差概率(CEP),又称之为圆形公算误差,表征事件发生于规定范围内的概率。
(5)几何精度因子
几何精度因子(GDOP)指GPS测距误差造成接收机与空间卫星间的距离矢量放大因子。表示为:
其中,A为系数矩阵。
在二维定位系统中,GDOP表示为:

(6)相对定位误差
相对定位误差(PRF)为定位范围最大圆(球)半径与定位精度的比值,表示为:
1.2 响应时间
响应时间指从终端或网络发出定位请求之后,到成功返回满意结果所用时间。响应时间越小,定位性能越好。
1.3 定位复杂度
定位复杂度分为定位算法复杂度和网络建设复杂度。定位复杂度与响应时间相关,定位越复杂响应时间越长。
2 移动网络定位技术
移动网络定位技术是目前应用最为广泛的定位方法,市场上大部分移动终端或者手持式移动设备都配备这种功能,比如全球移动通信系统GSM(Global System for Mobile communications)以及码分多址CDMA(CODe Division Multiple Access)这两种无线通信技术。以Cell-ID、WLAN、WSN为媒介,根据网络拓扑,对移动网络定位有了划分。
2.1 基于蜂窝网络定位技术
蜂窝网络定位属于无线电定位范畴,它所定位的对象是针对于静止或者慢速移动的对象,比如手机或者其他手持式设备。MS、移动网络,以及由卫星定位系统为定位基础,结合前两种而形成的定位方法。采取蜂窝网络定位,主要是采取对信号到MS的时间、时间差、角度进行测量,通过适当合理的计算估计出地理位置[1]。
蜂窝网络定位在很大程度上受到多径[2]、NLOS[3]、多址接入[4]、BS数目的限制。为了降低这些因素的影响,针对NLOS采取校正、加权、几何约束等方法;针对多址干扰,在改进算法的同时,还对网络的物理层进行检测,或者对应用干扰抵消的方法。
2.2 基于WLAN定位技术
WLAN定位技术利用WiFi终端(如笔记本、PDA以及智能手机等)扫描无线局域网协议中定义的参数,主要使用接收信号强度或者信噪比信息进行定位。WLAN定位技术有两种工作模式,一种利用工作基站(Access Point,也称访问点),另外一种是Ad Hoc模式,前者应用最为广泛,主要是因为具有更好的无线网络覆盖,网络通信也更加稳固可靠,而后者比较方便,建立临时对等无线网,灵活性比较强。
目前,基于WLAN定位[5]:一是RSSI技术的使用;二是对信号传输的衰减规律和信号强度等物理量的测量;三是借鉴了经验信号强度测量值和基于信号传播模型法。算法的改进,比如新型定位方法ABS(指纹识别定位)、GA(遗传定位算法)、DANN(适应性神经网络)等,均在一定程度上实现了预期的目的,减小了定位误差。
2.3 基于WSN定位方法
由于WSN两个特点:一是传感器节点,二是多跳自组织网络,为WSN辅助定位提供了条件。借助WSN采集用于定位的相关数据,例如距离、角度等量,然后通过特定算法将数据转化为坐标实现定位[6]。
基于WSN定位方法,主要取决于两方面内容,一是WSN性能的提高,二是对数据转化处理算法的优化和改进。WSN与传感器技术、微机电系统、网络和通信等技术息息相关,一方面硬件技术在改进,另一方面算法也得到了发展,三维定位算法扩展了WSN的应用领域,同时,随着技术的改善(低功耗、FPGA等),智能算法也会被普遍使用。
3 移动终端定位技术
随着3S(GPS、GIS、RS)技术的发展,并且伴随LBS的出现,移动终端定位已经深入各行各业,为广大用户的日常生活带来了极大的便利。由于移动终端定位有着广泛的市场前景以及潜在应用价值,很多国家地区,以及部分高等院校、研究机构投入了大量人力物力进行了研发。我国移动通信市场已日趋国际化,信息产业如今在国民经济所占比重尤为可观,同时对于核心技术,知识产权也尤为重要。因此,该技术已经成为人们关注的热点。
移动终端定位技术需要BS/LUM和MS的双方参与,前者发送定位信号,后者接收信号,同时利用某些定位算法,从得到的数据中计算出MS的地理坐标,实现定位的目的。由于需要MS的参与,对提高定位精度方面,就必须对其本身的软硬件进行改进,从某些程度上导致功耗的提高、体积的增加以及成本的提高。针对种种问题,主要采取TDMA、E-OTD、OTDOA-IPDL、A-GPS、GPSOne等[7-10]。
3.1 E-OTD定位技术
E-OTD定位技术是在GSM下发展起来的定位方式。E-OTD主要由3个量组成:观察时间差OTD、RTD以及GTD,其中OTD是MS接收到两个不同BTS信号的时间差;RTD是两个BTS之间的系统时间差;GTD是两个BTS到MS由于距离差而引起的传输时间差。三者之间数学关系是OTD=RTD+GTD[11]。
这种定位方法区别于同步网络和异步网络,在同步网络中,通过测量信号由若干BTS到MS的到达时间差OTD,来进行定位;在异步网络中,利用位置测量单元LUM(Location Measurement Unit),计算相对时间差RTD(Real Time Difference),用来补偿由于不同BTS的异步时钟所产生的误差,从而通过LUM和RTD两者的结合,作出相应的定位。从而构成方程:
其中C表示系数矩阵,向量xy表示MS位置坐标增量,向量D表示相对于xy的距离,通过变化得出:
在迭代求解过程中,为了减小误差,可以使用加权最小二乘法,求解之前,首先选择一个初始MS坐标位置,然后通过反复迭代直到逼近预先设置的临界值,从而确定出MS的空间位置。
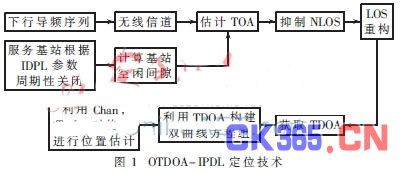
3.2 OTDOA-IPDL定位技术
OTDOA-IPDL是TD-SCDMA系统下的一种定位方式,该定位方法是在OTDOA定位技术的基础上,应用IPDL技术,目的是提高BS到MS之间测距准确性和可靠性。在IPDL期间,MS测量下行导频信号,得到TOA,估算出MS与BS之间的距离。具体定位过程为:测距、距离校准和算法实现。具体实现过程如图1所示[9]。
3.3 基于GPS的定位技术
随着市场需求的不断发展,广大用户对定位要求是越来越高,但是由于传统GPS定位冷启动时间长、功耗大、定位时间长等缺点的限制,从而 A-GPS、GPSOne等技术应运而生。其一是技术的进步和发展,其二是市场对定位的需求。
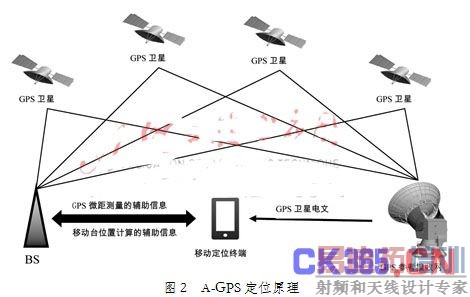
A-GPS定位技术[12]即辅助GPS定位技术,其原理如图2所示。辅助与否的关键在于是否有移动互联网参与定位环节。GPS定位关键在于GPS卫星发射信号,地面接收机接收并处理信号,通过特定算法解算出位置坐标。而A-GPS技术在此技术的基础上,让网络参与定位,其实就是传统概念的GPS定位与移动网络定位的相互结合,集空间、地面、终端于一体,一是减小了首次定位的时间,二是很大程度上能够克服地理环境上造成卫星信号无法正常接收的弊端。
辅助GPS定位技术目前在移动定位技术已经得到广泛应用,但是难免存在瑕疵。在室内情况下,由于卫星信号比较弱,A-GPS仍然不能发挥其优势,故而出现了GPSOne技术[13]。该技术是通过结合GPS卫星信号和CDMA网络信号进行混合定位,其在利用辅助GPS定位的技术的基础上,当移动终端处在室内这种不能接收较为稳定卫星信号时,可以通过移动网络实现定位,改善了室内定位的效果。
3.4 基于北斗导航系统的定位
北斗卫星导航系统(BDS)[14]是我国自主研发的导航定位系统,主要包括北斗一号和北斗二号两代系统。目前,北斗一号已经在某些地区投入工作,北斗二号还处在建设当中。BDS的投入使用,不仅对我国的国防、经济以及现代化建设有着举足轻重的作用,而且以其开放、自主、兼容、渐进等特点,将会服务于周边国家,将来也会服务于全球。
其主要由空间部分、地面中心控制系统、用户终端三部分组成,形成完善的定位网络。用户需要定位时,通过终端发出的信号,由两颗卫星转发至地面控制中心,地面中心计算出终端与卫星之间的距离,各以卫星为球心,以得到的距离为半径,终端所处与两球面的交线上,并结合地面中心的高程地图,即可做出定位。
4 移动定位技术的发展现状
互联网技术以及3S技术的发展为现代各行各业带来了极大的便利, LBS技术服务于各行各业,移动定位技术得到了快速的发展,很多国家和地区、科研单位以及高校均投入大量的人力、物力、财力进行了研究,并且取得了可观的成效。比如在车辆导航、游客指导、紧急救援或者搜救等方面都发挥了极其重要的作用。
目前而言,移动定位技术基本上以无线网络作为基础,以导航系统作为支撑,形成了无线网络定位、定位设备定位以及两者结合形成的定位技术,但是由于各种因素的制约,都在某种程度上影响着定位的精度和效率;再者,GPS、北斗等定位技术可以使精度上大大提高,不过一方面由于成本比较高,另一方面如果处在不能正常接收卫星信号的区域,其定位的能力在某种程度上也大打折扣。因此,对传统的定位方式精度的提高主要工作是定位设备硬件设备的提高和定位算法的改进。
5总结
移动定位技术已经深入人们的日常生活,如何快捷有效的实现实时定位已经是定位行业正在解决的问题。由于互联网、无线电、全球定位系统的飞速发展,目前移动定位已经得到较为满意的成果,但是还无法满足某些场合或者条件下,存在的种种客观条件的制约。随着技术不断进步,相信未来的移动定位技术会逐渐得以完善。
上一篇:小型低损耗智能集成模块应用方案详解
下一篇:基于直流通路划分的模拟集成电路布局方法

