- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
有源滤波器中的相位响应——低通和高通响应
录入:edatop.com 点击:
本文旨在考察滤波器传递函数本身的相位偏移。虽然滤波器主要是针对幅度响应而设计的,但在延时仿真、级联滤波器级,特别是过程控制环路等应用中,相位响应可能非常重要。
本文将集中探讨低通和高通响应。我们先来回顾一下,有源滤波器的传递函数可以视为滤波器传递函数和放大器传递函数的级联响应(图1)。

图1.作为两个传递函数级联的滤波器
首先,我们将重新考察一下传递等式的相位响应。
对于单极点低通情况,传递函数的相移为:
在等式中, 表示弧度频率(=2πf弧度/秒;1 Hz=2π弧度/秒),表示滤波器上的弧度中心频率。中心频率也可称为截止频率。就相位而言,中心频率指相移处于其范围50%时的频率。由于弧度频率当作一个比率使用,因此,频率比(f/fo)可以方便地替代。
图2(左轴)在中心频率以下二十倍频程至中心频率以上二十倍频程的范围内对等式1进行了评估。由于单极点低通 的相移范围为90°(0°至90°),因此,中心频率的相移为–45°。当时,归一化中心频率为1。

图2.单极点低通滤波器(左轴)和高通滤波器(右轴)在中心频率为1时的相位响应。
类似地,
单极点高通滤波器的相位响应计算公式为:
图2(右轴)在中心频率以下二十倍频程至中心频率以上二十倍频程的范围内对等式2进行了评估。中心频率(= 1)的相移为+45°。
如果低通 通带定义为低于截止频率的频率,高通通带定义为高于中心频率的频率,注意,最低相移(0°至45°)处于通带中。相反,最高相移(45°至90°)出现在阻带中(高于低通截止频率和低于高通截止频率的频率)。
在低通情况下,滤波器的输出落后于输入(负相移);在高通情况下,输出先于输入(正相移)。图3展示的是下列波形:输入正弦波信号(中部轨迹)、1 kHz截止单极点高通滤波器输出(顶部轨迹)和1 kHz截止单极点低通滤波器输出(底部轨迹)。信号频率也为1 kHz——两个滤波器的截止频率。45°的波形超前和滞后情况显而易见。
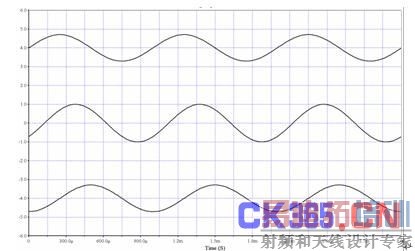
图3.单极点高通滤波器(顶部轨迹)和低通滤波器(底部轨迹)的输入(中部轨迹)和输出。
对于二阶低通情况,传输函数的相移近似值为:
 (3)
(3)图4(左轴)在中心频率以下二十倍频程至中心频率以上二十倍频程的范围内对该等式(= √2 = 1.414)进行了评估。此处,中心频率为1,相移为-90°。

图4.双极点低通滤波器(左轴)和高通滤波器(右轴)在中心频率为1时的相位响应。
在等式3中,(滤波器的阻尼比)为Q的倒数(即Q=1/α)。它决定着幅度(和瞬态)响应的幅度峰值以及相变的锐度。α为1.414时,表示双极点巴特沃兹(最平坦)响应。
双极点高通滤波器的相位响应可通过下式计算其近似值:
 (4)
(4)图4(右轴)对该式进行了评估,其中,=1.414,范围为中心频率以下二十倍频程至中心频率以上二十倍频程。中心频率(= 1)的相移为90°。
图2和图4采用的是单曲线,因为高通和低通相位响应类似,仅相移180°(π弧度)。这等于改变相位的符号,使低通滤波器的输出滞后,并使高通滤波器领先。
顺便提一下,实践中,高通滤波器实际上是宽带通带滤波器,因为放大器的响应会引入至少一个低通极点。
图5所示为一个双极点低通滤波器的相位响应和增益响应,表示为Q的函数。传递函数表明,相位变化可能分布在较宽的频率范围中,并且变化范围与电路Q成反比。虽然本文主要讨论相位响应,但是,相位变化率与幅度变化率之间的关系也是值得考虑的。
注意,每个双极点段都会提供一个最大180°的相移,并且在极端情况下,–180°的相移(虽然滞后360°)与180°的相移具有相同的属性。为 此,多级滤波器往往在有限范围内绘制其曲线图,比如180°至–180°,以提高图形的读取精度(见图11和图13)。在这种情况下,我们必须认识到,图 中绘制的角度实际上为真实角度±m×360°。尽管在这种情况下,图的顶部和底部(曲线图相移±180°)似乎存在不连续问题,但实际相位角度的变化是非 常平滑的,并且呈单调性。

图5.双极点低通
滤波器段的相位和幅度响应(为Q的函数)。
图6所示为双极点高通滤波器在不同Q下的增益和相位响应。传递函数表明,180°的相变可能发生在较大的频率范围内,并且变化范围与电路的Q成反比。另外要注意的是,曲线的形状是十分相似的。具体地,相位响应具有相同的形状,只是范围有所不同。
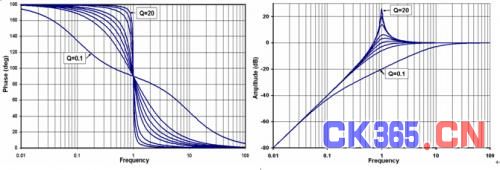
图6.双极点高通
滤波器段的相位和幅度响应(为Q的函数)。
放大器传递函数
放大器的开环传递函数基本上就是单极点滤波器的开环传递函数。如果是反相放大器,实际上是插入180°的额外相移。放大器的闭环相移一般忽略不计, 但是,如果带宽不足,就可能影响复合滤波器的总传递函数。本文随机选择了AD822以便对滤波器进行仿真。本文展示了对复合滤波器传递函数的部分影响,但 只是在较高频率下的影响,因为维持其增益和相移的频率比滤波器本身的角频要高得多。AD822的开环传递函数(摘自数据手册)如图7所示。
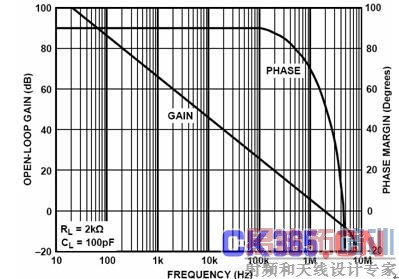
图7.AD822波特图增益和相位。
示例1:1 kHz、5极点0.5 dB切比雪夫低通滤波器
作为例子,我们将考察一款1 kHz、5极点0.5 dB切比雪夫低通滤波器。做出该随机选择的几个原因:
1) 与巴特沃兹情况不同,各段的中心频率都不相同。这样,图中的轨迹分布会更广些,图也就有趣些。
2) Q一般都略高。
3) 奇数个极点突出了单极点段和双极点段之间的差异。
滤波器段是用ADI网站上的滤波器设计向导设计的。
各段的F0和Q为:
F01 = 615.8Hz F02=960.8Hz F03=342Hz
Q1=1.178 Q2=4.545
图8所示为完整滤波器的原理图。所选滤波器拓扑结构——多反馈(MFB)——也是随机的,就像选择使单极点段成为有源积分器而非简单的缓冲式无源RC电路一样。
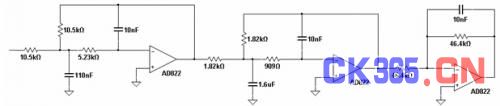
图8.1 kHz、5极点0.5dB切比雪夫低通滤波器。
图9所示为完整滤波器在各级的相移。图中所示为第一段本身(第1段,蓝色)、前两段(第1段和第2段,红色)和完整滤波器(第1段、第2段和第3段,绿色)的相移。其中包括各滤波器段的基本相移、各个反相放大器贡献的180°以及放大器频率响应对整体相移的影响。

图9.图8中的1 kHz、5极点0.5 dB切比雪夫低通滤波器的相位响应。
一些有意思的细节:首先,相位响应(为净滞后)负向累加。受放大器反相影响,在低频下,第一个双极点段始于–180°(=180° 模360°);在高频下,增至–360°(=0° 模360°)。第二段再添一次反相,因此,始于–540°(=180°模360°),在高频下,相位增至–720°(=0°模360°)。低频下,第三段始于–900°(=180° 模 360°),高频下增至–990°(=90° 模360°)。另外注意,当频率超过10 kHz时,受放大器频率响应影响,相位略微滚降。该滚降具有累加性,每段均有增加。
示例2:1 kHz、5极点0.5 dB切比雪夫高通滤波器
第二个例子(图10)考虑的是一款1 kHz、5极点0.5 dB切比雪夫高通滤波器的相位响应。在本例中,滤波器是用(同样使用滤波器设计向导)Sallen-Key压控电压源(VCVS)段而非多路反馈 (MFB)设计而成。虽然为随机选择,但是,VCVS只要求在每个双极点段使用两个电容,而不像多反馈那样要求每段使用三个电容,并且前两段同相。
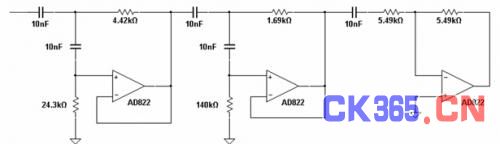
图10.1 kHz、5极点0.5 dB切比雪夫高通滤波器。
图11显示了滤波器各段的相位响应。低频下,第一段的相移始于180°,高频时降至0°。第二段(低频下增加180°)始于360°(=0°模 360°),高频时降至0°。第三段(添加反相)低频下始于–180°+90°=¬90°,降至–540°(=–180°模360°)。同样注意,高频下因放大器频率响应而增加的滚降。

图11.图10中的1 kHz、5极点0.5 dB切比雪夫低通滤波器的相位响应。
结论
本文考察了低通和高通滤波器的相移。上一篇文章考察的是相移与滤波器拓扑结构的关系。在将来的文章中,我们将探讨带通、陷波和全通滤波器,并且在最后一篇文章中,我们将纵览全局,考察相移对滤波器瞬态响应的影响,以及组延迟、脉冲响应和阶跃响应。
上一篇:智能视频监控信号采集电路模块设计
下一篇:解析:一种无线充电识别电路的设计

