- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
医用翻身床设计
录入:edatop.com 点击:
摘要:结合瘫痪病人的需求,设计了一种能自动实现抬头、屈腿、左右侧翻以及同时实现抬头和屈腿等功能的瘫痪病人多功能翻身床。考虑到该翻身床要实现各项功能,特将床板分割成八个部分。驱动方式上采用液压驱动方式,每个动作实现都是由两个液压缸同时直接驱动,上升和下降则通过改变换向阀方向来实现。控制部分采用单片机控制。综合考虑市场、医院及医疗器械相关部门因素,充分考虑了人机因素,确保各项功能实现的同时让病人感受到更多的宜人性。
全世界大约有 700 万瘫痪病人,而中国大约有140 万瘫痪病人,随着我国综合国力的增强,社会对瘫痪病人的投入也逐年在增多,市场对瘫痪病人用品的种类、档次、质量和数量也提出了更高的要求。而我国瘫痪病人用品的设计生产水平还停留在初级阶段,其产品多为一些科技含量较低、功能单一、价格低廉的产品;许多性能优越、功能多样、技术含量高的医疗器材,如电脑控制的翻身床、自动升降的电动翻身床、理疗床等产品与国外同类产品相比有很大的差距。
经过设计调查,病人对翻身床的要求不仅是抬头、屈腿两个功能,更需要侧翻和同时实现抬头和屈腿两个动作的翻身床。对于护理人员来说,每天为病人翻身、上药、更换床上用品等工作相当繁重,而手动翻身费力费时,相当困难,因此,迫切需要一种能够方便实现病人翻身的翻身床。针对国内目前瘫痪病人护理床的现状,本着“以人为本”的设计理念,设计制作一种成本低、功能齐全、操作简单的翻身床具有十分重要的现实意义。
1 翻身床方案设计
1.1 功能
经过设计调查,该翻身床主要具备以下功能:
(1)实现抬头和屈腿功能;
(2)实现在抬头的同时,也能实现屈腿动作;
(3)实现左、右侧翻动作。
1.2 工作原理
液压驱动的实现原理就是首先把电能转换为机械能,通过液压泵把机械能转化为液体压能,再由液压缸(马达)将液压能转化为机械能从而达到能量传递和做功的目的。该方案响应速度快,运动平稳,是比较理想的驱动系统。根据运动要求,对床板的驱动选用液压系统。所以在设计此次多功能自动翻身床时选用液压驱动(液压驱动如图 1 所示)。
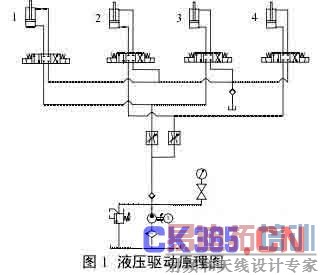
考虑到该系统的应用对象是病床,要求响应速度快,运动平稳、缓慢,我们采用的两个液压缸同时同步驱动,这样就可以更好地保证上述要求了。
1.3 结构
在设计翻身床的整个过程都是以病人为中心,为了能让病人在使用过程中最大限度的舒适,我们采用了双缸同时工作,即每执行任何一个动作都有两个液压缸同时工作(液压缸布置图如图 2 所示)。根据人的重量分布,前面的两个液压缸缸和后面的两个液压缸工作时承受的重量分别为人体的60%和60%,但是为了工作侧翻时达到前后两个缸同步工作,后面两个缸到转轴的距离是前面的两个缸到转轴距离的三分之二,这样就能达到平衡。

翻身床采用电机驱动液压泵运动,然后液压泵再将液压能转化进行工作的。每个动作的实现都有两个液压缸同时同步工作,动作的上升和下降则是通过控制电磁换向阀来实现的,而且每个动作的时间长短可以随使用者的需求而确定。
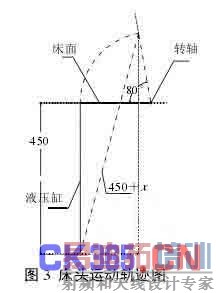
在几个翻身动作中,只有抬头的角度大,运动幅度大,要求抬头动作达到的最大角位移能达到80°,其对液压缸行程要求比较大,为了尽量减小安装尺寸,就以该部分为入手点确定各个缸的行程和位置。一方面瘫痪病人翻身床的总高限制(限制在570 mm 以下);而且根据液压缸自身结构限制,其总长至少要比实际行程长 250 mm,只有尽量减小缸的行程才能保证安装,所以就要求头部支点位置距转轴的距离要小;另一方面,在承载的情况下考虑床的运动平稳性和减小对床体承载能力的要求,应该让支点与该面的重心尽量重合。兼顾考虑以上两方面因素,经过反复的优化计算,最终确定液压缸支撑点到抬头动作转轴的距离为 210 mm,到侧翻动作转轴的距离为 240 mm;上下的安装距离为 450 mm。令液压缸的行程为 x,根据它们之间的关系(图2)可以建立如下关系式:
(210 - 210 cos80° ) + (450 + 210sin 80° ) = (450 +x)解得 x=220 mm,符合 x ≤ 250mm 的条件,考虑到安装误差等,最终确定液压缸行程为 230 mm。
为了使液压系统在工作过程中更加平稳,在液压系统的回油路上还要添加一个背压阀,经过计算该背压阀压力为 0.3 MPa,考虑管路的油路阻力和损失以及工作环境低噪声,综上所述,可选用流量为195 ml/s 和压力为 2.5 MPa 的叶片液压泵就完全满足要求。
2 翻身床体制作
为了降低加工成本,尽量采用市场上的标准零部件,同时参考有关医疗器械行业标准,床头、万向轮和扶手直接购买。床体主要分为床面和支架两大部分,整个床由万向轮、床面、床头、液压缸、液压系统、液压缸底部铰及基座组成,如图 4 所示。
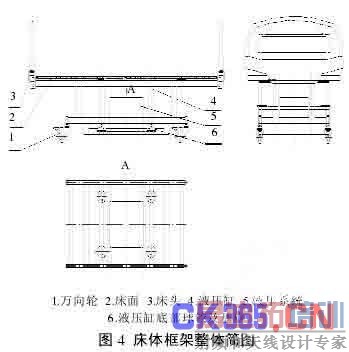
床面根据人身体结构特点分成四个功能段,分别支撑上半身,臀部,大腿和小腿。每个功能段又为分为两块,各个小块采用铰链联接。为了减小床的重量,床面的材料使用冲压成矩形条的铁皮焊接而成。支架直接用方钢焊接而成,四根立柱为螺栓联接,方便拆卸。
3 结论
由于在设计的过程中始终把功能和成本结合,在设计中尽可能采用标准件设计,使制造成本尽可能减少,在一定意义上可以解决瘫痪病人由于长年卧床所承受得疾病和心理的痛苦,同时也解决了医院的护理人员在护理过程中的工作负担。该医用翻身床可广泛适用于各大医院,疗养院、康复中心、家庭等。由笔者指导制作的医用翻身床(图 5)于2006 年参加第二届全国大学生机械创新设计大赛获二等奖。

参考文献:
[1]许万里,等. 微机控制病理床的研制与开发[J]. 哈尔滨理工大学学报,2001,(6).
[2]喻恒锋,等. 介绍一种新型“医用升降翻身车”[J]. 解放军医学情报,2004,(6).
作者简介:陈波(1965-),男,黑龙江齐齐哈尔人,教授,主要研究方向为产品设计、人性化设计。

