- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
移相干涉仪环境振动自动测量系统
录入:edatop.com 点击:
摘要: 环境振动和半导体激光器输出扰动都会引起移相干涉仪( PSI) 光学干涉场变化,为了评估环境振动对PSI 的影响,在干涉仪内部,用两只光电管分别测量光学干涉场某点辐射功率的变化及半导体激光器输出功率的扰动,可析取移相干涉仪的环境振动信息。两路光电测量信号经单片机进行模数转换后由串行通信接口传输到PC 机,通过可视化软件编程技术实现信号的图形化显示和环境振动信息的析取。
0 引言
移相式激光干涉仪易受到环境振动的干扰,微弱的振动会导致干涉场空间辐射功率的时变,使得CCD在采集干涉场过程中引入随机误差,难以保证λ/20以上的测量精度。为了评估环境振动,可以在移相干涉光路中嵌入光学外差测振系统,但光路较为复杂,对激光器的稳定性要求高,信号处理不易。如果使用普通半导体激光器作为干涉仪光源,其不稳定的功率输出会在振动检测系统中被误认为是振动信号。为了把振动信号与激光器不稳定的输出区分开来,本文设计了一种较为简单的基于单片机的干涉仪环境振动测量分析系统: 一只光电管测量干涉场的某点辐射功率,另一只光电管测量半导体激光器输出功率的变化; 将两只光电管的电压信号馈入MSP430 单片机,单片机内部ADC 模块对电压信号进行模数转换,数据通过单片机的串口传入计算机; 运用Visual Studio 软件平台,结合串行通信编程技术,对数据进行图形化显示与分析,得到去除了半导体激光器输出不稳定干扰的真实的干涉仪环境振动信号。
1 硬件系统
硬件系统包括两部分: 光学系统和电路系统。光学系统实现移相干涉测量、干涉场某点辐射功率及半导体激光器输出功率扰动的检测; 电路系统实现信号调理、变换以及与上位机通信。
1.1 光学系统
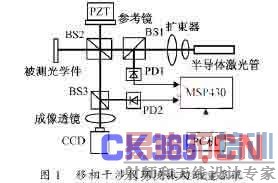
构建了光学移相干涉仪环境振动测量系统,如图1 所示。半导体激光器输出激光经扩束系统成为准直平面光源,平面光源经过分束镜BS1,有部分能量到达光电管PD1,通过PD1 可以监控激光器输出光功率的变化。平面光源经过分束镜BS2 分成两部分,反射部分投向参考平面镜并被反射后透过 BS2 成为参考光束;透射部分投向测试光学元件并被反射,被BS2 再次反射后成为测试光束。参考光束与测试光束形成空间干涉场,干涉场经分束镜BS3 分成两部分,透过部分通过透镜成像系统成像到CCD 靶面上( 由CCD 采集干涉图) ,反射部分被光电管PD2 进行点采样。如果有环境振动,通常会引起参考光束与测试光束间光程差的变化,干涉场波前相位也随之发生变化,导致PD2探测点处辐射功率的变化,在成像系统中亦可见到干涉条纹的抖动。由于PD1 可以测量激光器辐射功率的变化,PD2 测量干涉场空间某点辐射功率的变化,这样PD2 输出的信号既含有激光器输出功率变化的信息,又含有干涉仪因环境振动所导致干涉场变化的信息,因此只要把PD2 获得的信号与PD1 获得的信号作一个简单的数学处理就可以将环境振动信号提取出来,同时可消除半导体激光器非稳恒输出的影响。需要注意干涉场的两个干涉波面倾角不宜太大,以保证PD2 的光敏面满足相干检测的条件。
1.2 电路系统
采用TI 公司MSP430 系列单片机作为主控单元,具体型号为MSP430F149。电路系统功能框图如图2所示。

光电管PD1、PD2 输出的电信号经线性放大电路调理后,幅度在0 ~2.5 V 之间,分别与 MSP430F149 的ADC 信号输入引脚( 可提供A0 ~ A7 共 8 路外部模拟量输入引脚,这里仅使用A0 和 A1 两路,即图中P6.0、P6.1 两个引脚) 相连。MSP430F149 内部有12 位分辨率的逐次逼近式模数转换模块ADC12,片内参考电压选择为2.5 V,使用8 MHz 高速主时钟时,采样转换速率可达200 kS/s,采用序列重复采样与转换方式,模数转换的结果自动置入转换结果存储寄存器中,利用中断方式读取结果,并通过单片机的 UART 接口不断向上位机( PC 机) 发送相关数据。为方便起见,利用FT232 芯片设计了单片机 UART 串口转 USB 的接口电路,在计算机一端相应 USB 口被映射成虚拟串口,这样单片机发送的串行数据可直接被计算机读取。
2 软件编程
2.1 单片机程序
单片程序包括两个方面的内容: 一是A/D 转换程序,另一个是串口通信程序。这里只介绍A/D 转换程序。
ADC 模块的初始化及启动程序代码如下( 这一部分放在主程序中) :
P6SEL = 0x03; / / Enable A / D channel inputs
ADC12CTL0 = ADC12ON + MSC + SHT0_8;
/ / Turn on ADC12,extend sampling time
/ / to avoid overflow of results
ADC12CTL1 = SHP + CONSEQ_3;
/ / Use sampling timer,repeated sequence
ADC12MCTL0 = INCH_0;
/ / ref + = AVcc,channel = A0
ADC12MCTL1 = INCH_1 + EOS;
/ / ref + = AVcc,channel = A1,end seq.
ADC12IE = 0x02;
/ / Enable ADC12IFG.1
ADC12CTL0 " = ENC;
/ / Enable conversions
ADC12CTL0 | = ADC12SC;
/ / Start conversion
A / D 转换结果的读取在中断服务程序中进行:
#pragma vector = ADC12_VECTOR
__interrupt void ADC12ISR ( void)
{
A0result = ADC12MEM0;
/ / Move A0 result,IFG is cleared
A1result = ADC12MEM1;
/ / Move A1 result,IFG is cleared
}
单片机端的串口通信程序负责对上位机指令进行解释,并按上位机的要求通过UART 端口发送A/D 转换结果,代码从略。
2.2 PC 端串口通信编程
上位机PC 通过串口读取单片机( 下位机) 得到的A / D 转换结果。由于下位机电路系统中使用了FT232,PC 机把相关的USB 端口映射为串行口COMx( x 可能是一个不确定的数值,视具体使用的计算机而定) 。在Windows 环境下,采用Visual Studio 编程平台,使用微软提供的串口编程控件MSComm,可实现PC 与单片机的数据通信。
2.3 数据可视化与分析
使用微软提供的图表控件MSChart 实现数据可视化。另外,为了从干涉场信号中去除激光器输出扰动的影响,需要做软件调零和减法运算。原因是硬件电路中两路信号的放大倍数可能不匹配,在做减法运算前应进行软件调零。软件调零是指当不存在环境振动时,调整来自PD1 或PD2 数据的放大倍数,使得两者相减的结果为零,保存该放大倍数,并在后面的数据处理中使用。上述所有数据处理分析功能都由软件编程实现,当然还可以扩展更多的数据分析功能,比如实现振动信号频谱分析。
3 实验结果
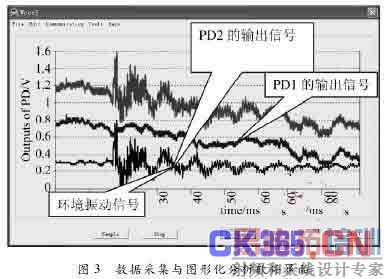
图形化数据采集与分析系统的软件界面如图3 所示,图中显示了来自光电管PD1( 检测激光器输出功率的变化) 和PD2( 检测干涉场某点辐射功率的变化) 的信号,以及去除了激光器输出不稳定影响的环境振动信号,图中显示的是一个冲激振动对干涉场的影响。
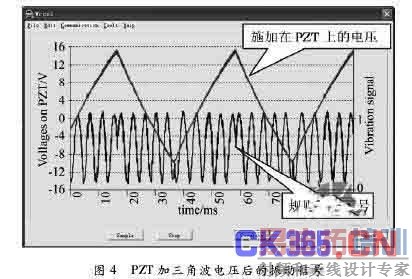
为了更好地说明系统的正确性和有效性,在PZT上加交变的三角波电压,形成规则振动,结果如图4 所示,所得的振动信号合乎规律,在PZT 电压转折点都形成相位跃变,信号幅度基本不受激光器输出不稳定的调制。
4 结论
本文利用两只光电管和单片机,在移相干涉仪中内嵌一个环境振动检测系统,并通过计算机软件编程技术以图形化的方式显示真正的环境振动信号,去除了激光器输出不稳定的干扰,为监控和消除环境振动对移相干涉仪的影响提供了一种可行、简单并易于实现的检测方案。
参考文献:
[1]吴栋,朱日宏,陈磊. 移相式激光干涉仪抗振技术的研究进展[J]. 激光与光电子学进展,2004,41( 6) : 25 -29.
[2]吴栋,朱日宏,陈磊. 移相干涉仪中微振动干扰的外差检测及信号处理[J]. 光电工程,2004,31( 9) : 53 -56.
[3]谢兴红,林凡强,吴雄英. MSP430 单片机基础与实践[M].北京: 北京航空航天大学出版社,2008.
[4]帕森斯. Visual Studio 2005 高级编程[M]. 北京: 清华大学出版社,2008.
基金项目: 江苏省高校自然科学基础研究资助项目( 07KJD140096)
作者简介: 吴栋( 1971—) ,男,副教授,博士,主要从事光电技术研究。
上一篇:单光子计数系统的设计与实现
下一篇:极紫外太阳望远镜分辨率的检测

