- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
实验室环境内傅里叶望远镜技术的实现
录入:edatop.com 点击:
1 引 言
深空卫星目标识别(SOI)是美国空军(US-AF)的空间监视任务,高分辨率成像对准确执行空间目标识别任务非常必要。经过对多项成像技术的层层筛选,美国军方最终选出少数几个作为将来的发展方向,傅里叶望远镜技术即是其中优点较为突出的一个[1]。
傅里叶望远镜采用3束光照射待观测的卫星,3束光中每束光与其它2光束有一个已知的频移。在地面上的3束光中,有2束光分开的物理距离是固定的,而第3束光与其它2束光分开的距离是可变的。理想情况下,每对光束在目标上形成已知空间频率的一个干涉条纹图形,用尽可能大面积的探测器收集目标的散射光。傅里叶望远镜的优点之一就是利用相位闭合消除大气扰动对像质的影响,通过改变3个1组的发射器的不同位置实现大量傅里叶分量的采样。通过改变所有可能的3个1组的发射器配置使采样空间频率充满傅里叶空间,相应数据就是物体图像的傅里叶变换,利用相位闭合重构算法就能重构出目标图像。
目前,对于傅里叶望远镜技术的实现只限于实验室和外场验证阶段,美国对此只进行过少量报道[2-4]。为了验证傅里叶望远镜成像原理的正确性,在结合已有的实验方案基础上,本文提出更为简单的方案来证明傅里叶望远镜技术在实验室条件下是可行的。
2 实 验
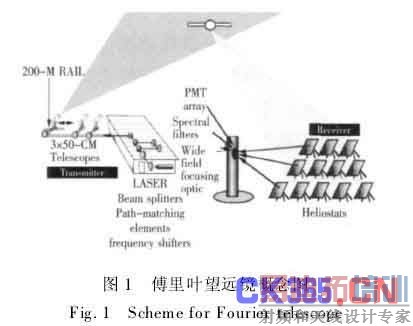
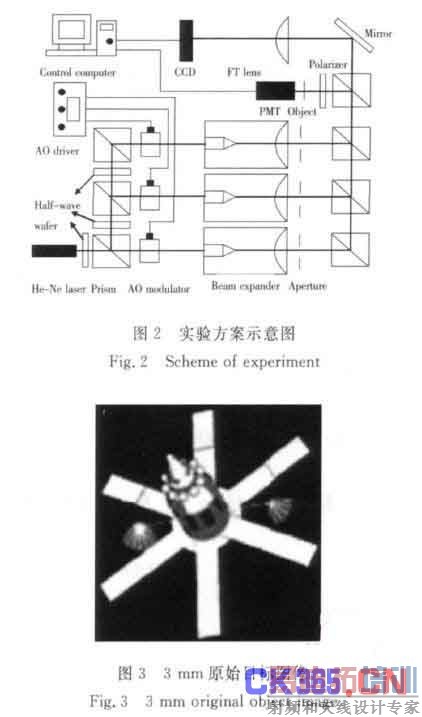
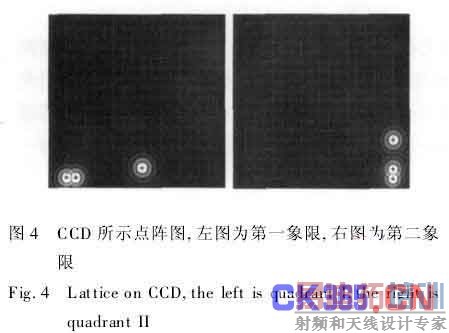
图1给出傅里叶望远镜成像概念图[5]。图2给出实验方案示意图。实验采用相干长度较长的线偏振单模He-Ne激光器作为光源。6个偏振分光棱镜分别起到分束和合束的作用。在光路中加入3个半波片和1个偏振片,使3路光通过偏振片后最终的光强近似相等。声光移频器使激光产生布拉格衍射,取一级衍射光。这时3路光的频率产生微小频差,从而产生3组叠加的移动干涉条纹,实现条纹对目标的扫描。衍射光经过空间滤波器和扩束透镜后变为近似平面波,然后再经棱镜合成一束照射在透射物体上。透射物体为用硫酸纸打印的3 mm卫星图片(图3所示),因硫酸纸有漫反射作用,故3束光通过物体后向很宽的空间范围散开,只有部分散射光射入光电倍增管。光电倍增管接收经透射物体漫射后的受时间调制的能量。实验选择测量信噪比为100。
CCD探测面用于标定扫描条纹的粗细和取向(对应获取目标的空间频率)。3路光经过分光棱镜后,一部分射向光电倍增管方向,另一部分射向CCD方向。在CCD前放置焦距为1 m的会聚透镜,把3束平行光会聚成CCD靶面上的3个衍射斑。通过计算机软件编程,可以在CCD显示区域绘制出方形点阵,对应所要获取的目标的空间频率。点阵中相邻两点的距离由公式![]()
![]() 计算得出。其中d是相邻格点对应的CCD像素个数,p为像元大小,λ为激光波长,f为透镜焦距。实验所用参数为:p=9μm,λ=632.8 nm,f=1 m。
计算得出。其中d是相邻格点对应的CCD像素个数,p为像元大小,λ为激光波长,f为透镜焦距。实验所用参数为:p=9μm,λ=632.8 nm,f=1 m。
为了从3光束干涉条纹扫描物体后的能量变化中同时分离出3个光学拍频各自对应的能量值,需要选择不同的拍频(即经过声光移频器后的3束一级衍射光的频率的差频彼此不同)。实验中选用的差频值为50 kHz,100 kHz,150 kHz。能量探测器选用Electron tubes公司的P30A-05型光电倍增管,其光子接收面积为25 mm。采集卡选用NI公司的高频多功能采集卡PCI6115。为了能使采样值更好地反映真实情况,在最低差频(50 kHz)的一个周期内采样100个点;同时为了平滑信号的随机噪声,连续采样1 000个周期(50 kHz对应周期),取平均值。
因绘制的点阵中格点数越多,成像分辨率越高[5],故实验中采用33×33点阵。对于实际目标,傅里叶系数ksignal和-ksignal互为共轭复数,只需测量两个中的一个。这样对于33×33点阵只需测量33×17个格点,相当于4个象限中只取第一和第二象限数据就可以重构目标图像。
显示器所示的CCD探测面上的点阵如图4所示。测量第一象限数据时,把固定光束经透镜会聚后的衍射斑置于33×17点阵底部的中心,剪切光束对应的衍射斑置于固定点右边相邻格点,扫描衍射斑从剪切点右邻格点开始,逐个扫描第一象限中除固定点和剪切点外的所有格点。扫描点每移动到一个格点采样一次数据,一个象限的总采样次数为16×16+15=271。测量第二象限数据时,固定点位置不变,把剪切点放置于固定点上面相邻位置,扫描点扫描第二象限中除固定点和剪切点外的其他格点。获得2个象限共271×2=542个数据文件后就可以通过相位闭合重构算法重构目标图像。为了与图像重构程序中的相位闭合算法匹配,选取3束光中频率最低者为固定光束,频率最高者为扫描光束,频率中间者为剪切光束。
3 图像重构和分析
点阵中的每个数据点产生对应物体空间频率波矢量的傅里叶系数复振幅和相邻数据点之间的相位差。剪切点和固定点对应的空间频率为基准空间频率,据此可推出点阵中任一点相对于固定点和剪切点的相位差,即可得到每个数据点的傅里叶相位。
光电倍增管探测经物体漫射后的能量信息并把能量变化转化为电压变化。这时电压信号为模拟量,经过采集卡,可把模拟信号转化为12位数字信号并存储在计算机硬盘上。
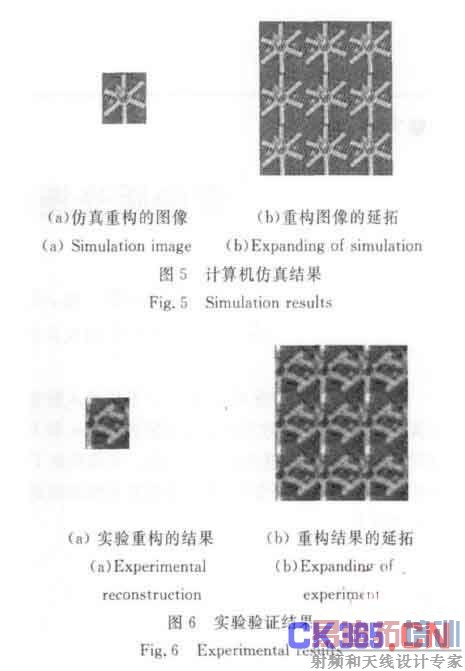
利用128 pixel×128 pixel的数字卫星图像产生数据文件并采用图像重构算法完成模拟,如图5所示,其中左图为直接仿真结果,右图为经相位延拓后的结果。利用和仿真相同的图像重构算法把实验采集的数据文件重构为目标图像,如图6所示,其中左图为直接重构结果,右图为经相位延拓后的结果。通过比较可以看出实验重构图像和仿真图像有较好的相似性。
4 结 论
本实验证明了傅里叶望远镜技术在实验室条件下的可行性。3 mm目标在信噪比为100时的实验重构结果和计算机仿真结果之间有较好的一致性。今后还将研究不同分辨率、大小形状各异的目标和不同信噪比等因素对成像结果的影响,为实际系统设计提供参考。
参考文献:
[1] RIDER C D,JINGLE C,NIELSON E.Deep sPACe imaging study[C].Proceeding of the1996space surveillanceworkgroup.Massachusetts:MIT Lincoln Laboratory,1996:147-159.
[2] CAMPBELL B F,RUBIN L,HOLMES R B.Synthetic-aperture imaging through an aberrating medium:experimen-tal demonstration[J].Appl. Opt.,1995,34(26):5932-5937.
[3] KENNETH R,JAMES M,BOGER K,et al..An experimental demonstration of Fourier telescopy[C].SPIE con-ference on Digital Image Recovery and Synthesis IV.Colorado:Denver,1999:23-29.
[4] CUELLAR E L,STAPP J,COOPER J.Laboratory and field experimental demonstration of a Fourier telescopy ima-ging system[C].SPIE,2005,58960D1-15.
[5] HOLMES R B,MA S,BHOWMIK A,et al..Analysis and simulation of a synthetic-aperture technique for imagingthrough a turbulent medium[J].J.Opt.Soc.Am.A,1996,13(2):351-364.
作者简介:董 磊(1982-),男,山东济宁人,研究实习员,主要从事激光物理与技术和傅里叶光学的研究。E-mail:node-pression@126.com
上一篇:薄膜反射镜的成形控制
下一篇:基于VB的电子天平性能测试平台的设计与实现

