- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
新型微机械变形反射镜研究
录入:edatop.com 点击:
摘要 提出一种新型的静电驱动微机械变形反射镜,研究了静电力驱动的静态模型和动态模型。结果表明,驱动器的变形位移随驱动电压的增加出现稳定的非线性增加和不稳定的“拉入”现象;当变形镜由余弦电压驱动时,平衡位移的响应为2倍频的余弦信号;变形镜驱动电压撤除后驱动器上电极薄板经过17μs回复到驱动前的未变形状态。所得结果对于设计微机械变形镜具有重要意义。
1 引 言
变形反射镜是自适应光学系统中的核心组成部分之一[1],它的表面质量、尺寸、功耗、冲程和响应时间等参数直接决定了自适应光学系统的性能。现有的几种变形反射镜大都采用材料的压电效应进行驱动,驱动电压较高,响应频率较低,且体积大、成本高,因而目前大都只应用于大型地基天文望远镜的自适应光学系统中[2]。为了推广自适应光学的应用,急待解决的问题就是发展小型低能耗的变形反射镜。MEMS技术极大地推动了自适应光学技术的发展,用MEMS技术制造的微机械变形反射镜具有体积小、成本低、能耗低、响应快及集成度高等传统自适应光学系统不具备的特点,可以用标准化工艺大批量生产,在天文、航天、光通讯、高精度测距、遥感、强激光技术、医疗仪器等众多领域都有潜在的应用前景[3]。文中给出了一种新型的MEMS连续薄膜变形反射镜的设计思路,并对其工作原理和性能进行了分析和讨论。
2 原理和结构
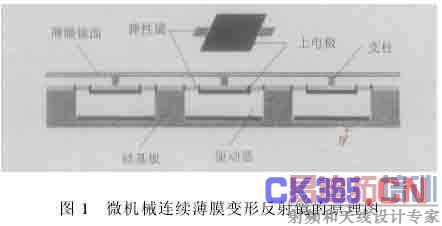
MEMS连续薄膜变形反射镜结构如图1所示,主要由硅基板、驱动器阵列和柔性连续膜镜面组成。镜面由铝反射膜和多晶硅膜双层膜构成,薄膜镜面通过刚性支柱自持于驱动器阵列单元上方。驱动器阵列单元下部分由方形电极、氮化硅层和硅基板构成,上部分由方形电极和氧化硅薄板构成,氧化硅薄板通过弹性梁支撑于硅基板。这种结构的驱动单元由上下两块平行方形板组成,当在上下平板间施加电压时,产生的静电力会将上平板下拉,从而带动相应的镜面支柱位移。通过控制驱动器阵列单元位置坐标电极和电压,就可获得特定的镜面形状。
3 静电驱动力的静态模型
微机械变形反射镜是靠静电作用驱动的,静电力会将上平板下拉,产生垂直于平板所在平面的运动,而同时弹性梁会产生回复力,二者平衡时上平板就会稳定在某一位置。作用在变形镜驱动器上平板的力由驱动器上下电极之间的电压V决定,该静电力可由方程(1)表示:
静电力使上平板下移,弹性支撑梁的形变产生回复力为:
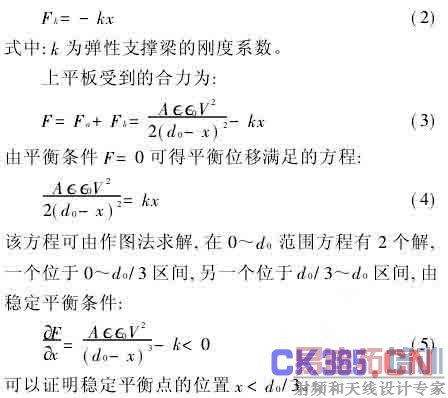
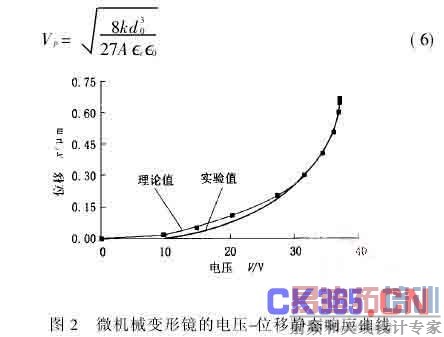
由(4)式可得x=d0/3时的临界电压为:
式(1)和(2)表明,当位移x增加时,回复力Fk是线性增加的,而静电驱动力Fa是非线性增加的,其增大程度远远大于回复力。当x
图2是根据公式(4)绘制的典型结构参数的微机械连续薄膜变形反射镜在静电力驱动下的位移随电压的变化。该结构的各部分数据为:上电极面积A为300μm×300μm,上、下电极的初始距离d0为2μm,上平板厚度t为2μm;弹性支撑梁的刚度系数k取460N/m。作为对比,图中比较了理论计算曲线与文献[4]报道的实验曲线。在稳定驱动范围内,薄膜变形反射镜的变形位移随驱动电压非线性增加,电压越高,理论值和实验值越接近。
4 静电驱动力的动态模型
在公式(1)中,若驱动电压V=VAcosωt,则静电驱动力Fa可以表示为:
若驱动电压有直流偏压,即V=VD+VAcosωt,则静电驱动力Fa可以表示为:

因此静电驱动力中有ω和2ω两种频率成分。图3是根据公式(4)绘制的典型结构参数的微机械连续薄膜变形反射镜在公式(7)静电驱动力作用下的位移随时间的变化。结构参数数据同图2,驱动电压幅度31.56V,驱动电压频率700Hz。从图3可以看出,当变形镜由余弦电压驱动时,位移的响应为2倍频的余弦信号,与文献[5]报道的实验结果相吻合。
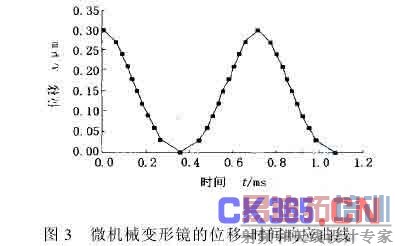
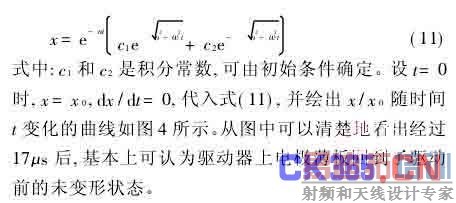
变形镜的镜面面形需要发生改变,既驱动器上电极薄板需要下拉也需要回复,因此变形镜变形后回复到未变形状态的时间是1个很重要的物理量。当可动的上电极薄板被释放(驱动电压降为零),发生减幅振动,最终到达不变形状态。作为1个有效的近似,该运动可以用下面的二阶微分方程表示:

5 结 论
微机械连续薄膜变形反射镜的变型位移x
参考文献
[ 1 ] Tyson R K. Principles of Adaptive Optics.2nd ed,Newyork:Academic Press,1998: 37-48.
[ 2 ] Thorburn W G, Kaplan L. A low voltage electro- distortive mirror system for wavefront control. Procof SPIE,1991,1543:52-56.
[ 3 ] Gleb Vdovin, Simon Middelhoek. Technology andapplications of micromachined silicon adaptivemirrors. Optical Engineering, 1997, 36 (5): 1382-1390.
[ 4 ] Mark N Horenstein, Thomas G Bifano, RajiKrishnamoorthy Mali, et al.. Electrostatic effects inmicromachined actuators for adaptive optics. Journalof electrostatics,1997,42:69-81.
[ 5 ] Bhalotra S R , Mansell J D . Parallel plate MEMsmirror design for large on resonance displacement.2000 International Conference on Optical MEMS,Poster p5, Kauai, Hawaii, USA, Aug. 21~24,2000.
[ 6 ] 陈宏,鲍敏杭.硅微结构加速度传感器空气阻尼的研究.半导体学报,1995,16(12):921-927.
[ 7 ] 殷玲,陈非凡.可编程相位光栅结构的微机械特性研究.微细加工技术,2003(3):72-76.
作者简介
闫金良 男 1965年出生 博士 教授 主要研究方向为光电材料与器件E-mail:yanjinliang9@tom.com

