- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
主观式人眼波前像差仪中 像处理与自动跟踪的研究和实现
录入:edatop.com 点击:
曹正林 沈建新 廖文和 张运海
(南京航空航天大学机电学院, 江苏南京210016)
提要 人眼像差的矫正是目前眼科界的研究热点之一,对于提高人眼视觉质量具有十分重要的意义,人眼像差的测量是像差矫正的基础。本文研究了主观式波前像差测量仪的测量原理,并对其中的图像采集、图像处理、图像的Ostu法阈值分割,自动跟踪等关键技术进行了研究。采用本文研究的关键技术自行研制出的主观式波前像差仪能精确地测量出人眼的低阶和高阶像差,测量结果可达7阶35项,其应用前景广阔。
关键词 图像处理 主观式波前像差仪 自动跟踪 图像分割
自从1999年世界上首例波前像差引导LASIK手术以来,引起了广泛的兴趣[1,2]。目前用波长为193 nm的准分子激光切削角膜矫正近视、远视、散光已是一项成熟的技术[3,4]。在LASIK手术中,激光切削必须要和眼睛屈光不正的球镜与柱镜相符合,特别是针对特定的高阶像差以及球面与柱面像差,这就是我们今天所说的“个体化”切削。个体化切削在手术中需要很高的精确性,准确的控制激光切削。因此在波前像差引导的“个体化”角膜屈光手术中,波前像差的精确测量是至关重要的。近年来,随着激光角膜屈光手术的开展,各种测量人眼波前像差的新仪器不断涌现[5,6]。目前市场上的像差测量仪大体上可以分为主观式和客观式两种类型。本文主要介绍了自行研制的WFA1000型主观式波前像差测量仪的测量原理,测量仪中图像处理与分析技术以及自动跟踪技术的研究与实现。
测量原理
本文介绍的自行研制的主观式波前像差仪是基于光路追踪原理,利用He JC等[7]的主观空间分辩屈光计原理开发出来的。该像差仪具有三通道光路系统:测量光路通道,记录光路通道,瞳孔监视光路通道。在测量过程中,测量光路通过一个直径为1毫米的可移动小孔在视网膜上形成一个绿色的十字光标,小孔位置在37个采样位置上随机改变,小孔位置的移动导致十字光标在视网膜上的图像位置产生偏移,受测者在记录光路中的电脑屏幕上点击鼠标记录下该偏移量,通过该偏移量就可用ZerNIke多项式拟合出人眼像差的函数。在整个测量过程
中,瞳孔监视光路利用红外CCD连续捕捉瞳孔的图像,通过控制软件对图像进行处理,利用计算机驱动步进电机实现测量过程中的自动跟踪,使瞳孔中心与像差仪的光学中心重合,此外,还在一个可移动圆盘上放置了一系列的补偿镜片,可对受测者的离焦进行补偿,以保证测量结果的准确性。
图像处理技术的研究与实现
WFA1000中的图像处理部分主要包括图像采集、图像处理与分析。
图像采集也就是图像数字化的过程,即将图像采集到计算机中,并转化成计算机可以处理的图像格式。在WFA1000中主要采用CCD和图像采集卡来实现对人眼瞳孔图像的捕捉。在实际的软件实现过程中,采用了Microsoft公司提供的VFW编程模式,捕捉到瞳孔的图像后,将其保存为位图格式,供后续的图像处理与分析使用。程序的实现是采用双线程的编程模式,用单独的线程对图像进行处理与分析,以加快图像处理与自动跟踪的速度。
图像处理与分析包括图像的灰度化处理、图像分割、灰度直方图的计算、图像的二值化处理、瞳孔中心坐标的计算。图1所示就是在测量过程中采集到的经过灰度化处理后的人眼瞳孔图像
图像的灰度化处理是指将通过CCD捕捉到的彩色图像转化为灰度图像。彩色图像转换为灰度图像的原理为:彩色图像使用一个三维矢量(R,G,B)来表示一个像素点,而灰度图像则用一个灰度级(Gray Level)来表示。因此这种转化可以看作是从一个三维矢量到一个一维矢量的投影操作。通常,可以用一个线性变换来完成转换过程,如下式:'
![]()
其中,R(x, y), G(x, y), B(x, y)分别为像素点(x,y)的R,G,B三个分量的值,l,k,m为预先确定的参数,P(x, y)为求得的灰度级。在WFA1000的程序设计中,取l = k = m = 1/3,程序中具体的实现算法为:

在图像的灰度化处理后,必须进行图像分割(Image Segmentation)处理,分割图像时,首先进行图像灰度直方图的计算,用以确定后续的二值化处理时所需的阈值,然后再进行二值化处理。二值化处理是为了将经过灰度处理后的图像中的瞳孔,照明灯的亮点与背景分离开,同时去除图像中的噪声。
图像分割的方法有很多种,阈值分割是图像分割的一种常用的方法,阈值分割就是用一个或几个阈值将图像的灰度分布直方图划分成几个类,认为灰度值在同一个灰度类内的像素属于同一个物体。阈值的选取是阈值分割的关键技术。通常,选择一个阈值将灰度范围划分成物体和背景两类,这称为图像的二值化处理。二值化处理的原理为:
让t∈G作为阈值,B={b 0,b 1}为一对灰度级,b 0,b 1∈G。用灰度级t作为阈值对图像函数f (x ,y)进行二值化的结果是产生一个二值的图像函数:
![]()
阈值的选取就是要基于某种标准来确定一个最佳阈值t*,确定最佳阈值的方法多种多样,此处采用的是Ostu提出的最大类间方差法[8]选取阈值。Ostu方法计算简单,稳定有效,是实际应用中经常采用的方法。这是一种基于判别式分析的方法,该方法把图像中的像素按灰度级用阈值t划分成两类C 0和C 1,即C0={0,1,……t},C1={t+1,t+2,……l-1}。σB 2表示类间方差,σT 2表示总体方差,通过关于t的等价的判决准则函数η=σB 2/σT 2达到最大值来确定最佳阈值t*,其中σT2已知,与t值无关,因此最佳阈值![]()
在程序实现过程中,通过Ostu方法选取了两个阈值对图像进行二值化处理,从而将四个照明灯亮点以及瞳孔从背景中分离出来,在本系统的程序处理中,将照明灯亮点灰度值设为255,背景灰度设为125,瞳孔灰度设为0。
将瞳孔和照明灯亮点从背景中分离出来后,就可以利用重心公式分别计算出瞳孔的中心坐标以及四个亮点的中心坐标。瞳孔中心的计算是整个图像处理中的关键,准确的计算瞳孔中心坐标是系统中图像处理的主要目标。如果不能正确的计算瞳孔中心坐标,程序就无法正确运行,也无法实现测量过程中的瞳孔自动跟踪功能。在计算瞳孔中心时,根据分离后的二值数字图像的特征,将X方向上的像素点相加之和除以图像的面积,由此可计算出瞳孔中心的X坐标,同理可得瞳孔中心的Y坐标。程序中的实现代码如下
for(int y=rcRange.top; y
for(int x=rcRange.left; x
{BYTE greyValue = (*this)[y][x];
if(greyValue==PUPIL_COLOR) //PUPIL_COLOR=0表示瞳孔的灰度值
{sum_x_coor+=x; //X方向的像素值累加
sum_y_coor+=y; //Y方向的像素值累加
m_eyePupil.area++; //瞳孔面积的累加
} }
//计算瞳孔的重心和半径
m_eyePupil.gra_x_coor= double(sum_x_co2or)/m_eyePupil.area;
m_eyePupil.gra_y_coor= double(sum_y_co2or)/m_eyePupil.area;
m_eyePupil.radius=sqrt(m_eyePupil.area/PI);
在计算获得准确的瞳孔中心后,将获得的瞳孔中心与像差仪的光学中心相比较,以确定自动跟踪的方向,从而实现系统的自动跟踪功能。
整个系统中从图像采集到瞳孔中心的计算流程图如图2所示:
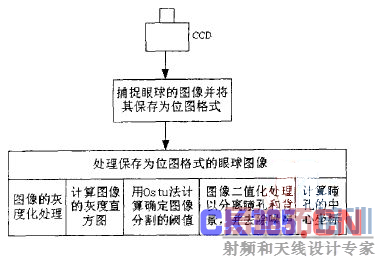
Fig 2 The flow chart of image processing and analyzing
自动跟踪技术的研究与实现
眼球图像的实时处理,瞳孔中心的实时计算以及自动跟踪技术在人眼波前像差的精确测量中至关重要。在波前像差引导的准分子激光“个体化”切削角膜手术中,测量结果的准确与否将直接影响激光角膜切削手术的效果和手术后患者的视觉质量。
在测量人眼波前像差时,要求瞳孔的中心与像差测量仪的光学中心重合。在实际的测量过程中,由于患者的眼球总是不停的转动,瞳孔中心就会偏离测量仪的光学中心,导致测量结果不准确。这就需要有自动跟踪系统来跟踪瞳孔的运动,实时的捕捉瞳孔的中心,然后根据捕捉到的瞳孔中心调整仪器使其光学中心与瞳孔中心重合,才能保证测量结果的精确性。
WFA1000型主观式像差测量仪中,利用计算机的通信串口COM2端口来实现自动跟踪功能。在该系统中,利用COM2端口来控制步进电机的X,Y方向的控制脉冲,从而控制X,Y方向的移动距离来跟踪瞳孔的运动,达到精确测量人眼像差的目的。
在进行自动跟踪时,首先比较瞳孔中心与光学中心的坐标,判断瞳孔中心和光学中心是否重合,如果不重合,则计算两者偏差的大小,确定偏差的大小和方向后,通过COM2端口驱动控制脉冲在X,Y方向进行相应的补偿,使得光学中心与瞳孔中心重合。在测量完毕或停止自动跟踪后,关闭串口。系统的自动跟踪流程图如图3所示:
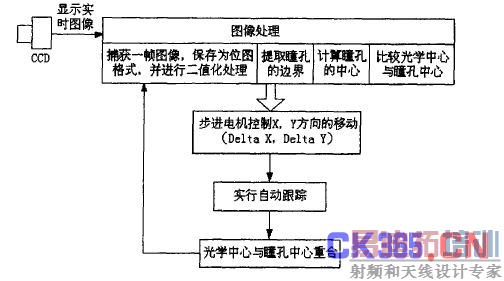
Fig 3 The flow chart of pupil"s auto tracing
总 结
本文介绍的图像采集、图像处理与分析的技术,以及自动跟踪的实现技术已经应用到自行研制的WFA1000型主观式波前像差测量仪中,该测量仪可以精确测量人眼的高阶和低阶像差,并将结果用Zernike多项式、二维和三维的伪彩色像差图表示,测量精度可达7阶35项。该主观式人眼像差仪可测量近视、远视、散光、斜视、球差、慧差和高阶像差的全部信息,可应用于眼科临床手术、视力测定(验光)以及科学研究等方面。其测量结果应用于波前像差引导的准分子激光“个体化”切削角膜手术中时,可以明显改善患者的视觉质量。
参考文献
[1] Mrochen M, Kaemmerer M, Seiler T, Wavefront -guided laser in situ keratomileusis: early results in threeeyes , Journal of Refractive Surgery, 2000, 16(2),116
[2]Cynthia Roberts, Biomechanics of the cornea and wave2front guided laser refractive surgery , Journal of Refrac2tive Surgery, 2002,18(9/10),S589-S592
[3]张运海,沈建新,廖文和,准分子激光矫正复性近视散光的屈光学机理及应用,光学精密工程,2003,11(3), 291
[4]沈建新,胡利刚,等,LASIK和PRK术中角膜数学建模,中国生物医学工程学报,2003,22(4), 289
[5]Sophia I. Panagopoulou, Ioannis G. Pallikaris, Wave2front customized ablations with the WASCA Asclepionworkstation , Journal of Refractive Surgery, 2001,17(9/10),S608
[6]Howard C. Howland. The history and methods of Oph2thalmic wavefront sensing , Journal of Refractive Sur2gery, 2000,16(9/10), S552
[7]He J C, Marcos S . Measurement of the wave-front ab2erration of the eye by a fast psychophysical procedure,J.Opt.Soc.Am.1998, A15,2449
[8]P.K.Sahoo, S.Soltani, A.K.C.Wong and Y.C.Chen, "A Survey of Thresholding Techniques", ComputerGraphics,Vision and Image Processing,1988,(41), 233

