- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
一种新的激光辅助钢板宽度测量系统的实现
录入:edatop.com 点击:
1 引言
在工业现场,结构光以其独特的优点被广泛运用于高精度测量中。点结构光多用于基于三角测量原理的测量系统中,多线结构光和网格结构光则多用于三维建模和人工智能。随着检测及传感器、电子信息、计算机、通讯等技术的发展,钢板测宽仪经历了光机扫描式、主动式CCD光电、被动式CCD光电到激光辅助CCD光电几种测宽仪的发展。从方法上,大致有机械接触式测宽法、电视测量法、线阵CCD测宽、激光测宽等,但存在精度不高、劳动强度大、技术实现复杂,甚至有的还有一定的辐射。这里提出一种简单易行的方案来实现基于面阵CCD和激光辅助的测宽系统。
2 测量系统实现
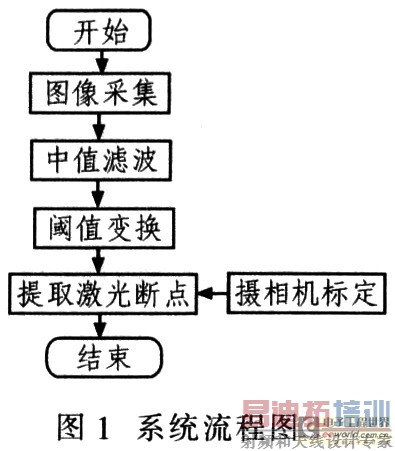
系统实现有相机标定、图像采集、中值滤波、阈值变换、提取激光断点、计算钢板宽度等步骤,如图1所示。
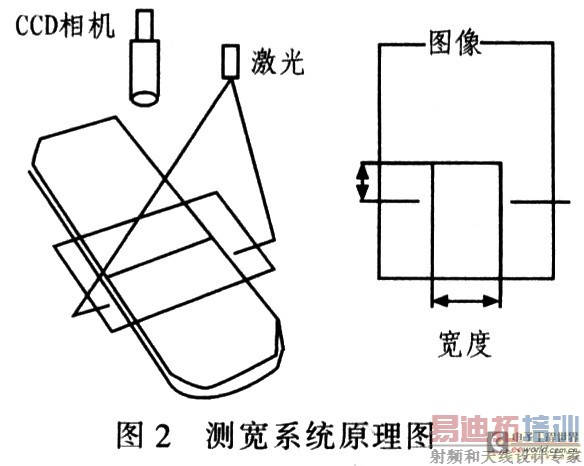
摄像机标定和图像处理,具体如下:首先激光器照射到钢板上,由千兆网相机拍照,经千兆网卡输入计算机,图像处理后获得激光断点的两个图像坐标。由标定得到的数学模型获得激光断点的空间坐标。根据勾股定理求得该两点之间线段的长度,现场有凹槽同定钢板,可不考虑钢板倾斜,该线段的长度即为钢板的宽度。图2为测宽系统原理图。
2.1 摄像机标定
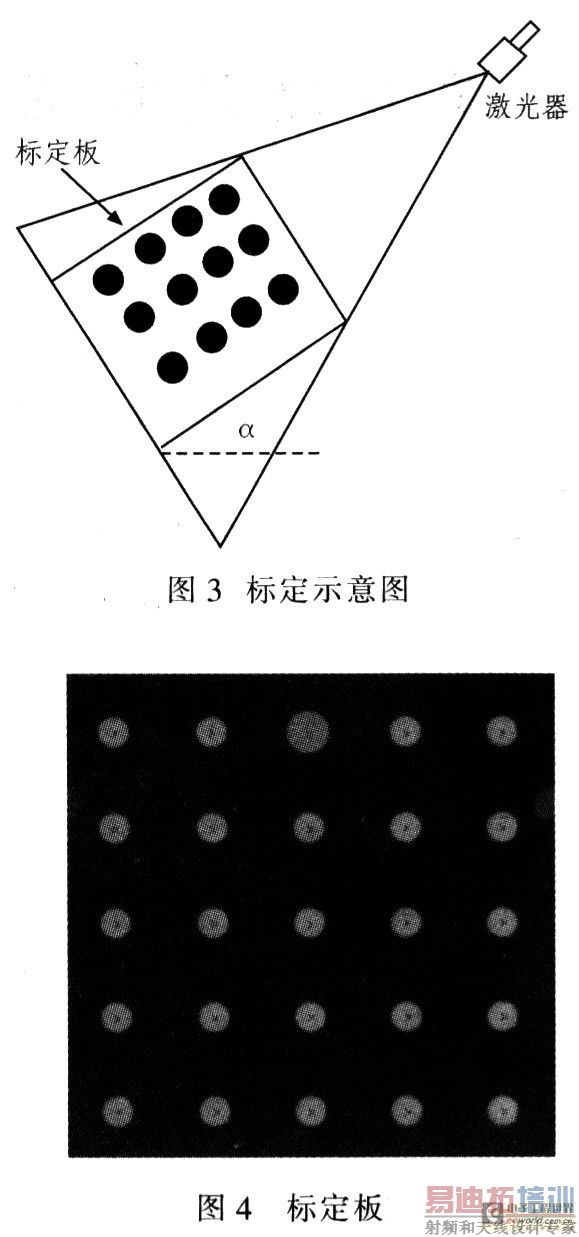
摄像机标定是指由世界坐标系中标定点以及对应图像像素坐标导出摄像机矩阵,并估计摄像机的内部参数。由于无论钢板厚度如何变化,钢板始终和激光面有条交线,即钢板宽度方向。与z轴方向无关,因此使用平面标定,如图3所示。将标定板(图4)放在激光面上,以垂直于标定板的方向为z轴,以平行和垂直于钢板宽度的方向在标定板上建立平面直角坐标系。选取圆的中心为标定点,两个相邻圆心之间的距离是16 mm,根据选取的坐标系,这些标定点在激光面上的位置是已知的,通过获取其对应的图像坐标确定摄像机的12个内外参数,从而完成标定工作。
由一组已知的世界坐标系的点以及对应在图像坐标系的点可以确定两个方程,因此,要确定摄像机的内外参数,需至少知道6组这样的点,而所采用的靶标可以提供充足的特征点,利用最小二乘法确定各个摄像机的内外参数。从透影的角度看,图像坐标与世界坐标一定存在某种关系。由应用光学理论可知,在完全理想的情况下,图像坐标(x,y)和世界坐标(X,Y,Z)(假设Z=0)应是比例关系。然而由于存在畸变,以及CCD摄像机安装的误差(与光轴不垂直),使这一比例关系发生改变,而导致它们存在非线性关系。这一对应关系根据精度要求的不同可采用不同的模型描述,根据问题的实际情况,用二元二次多项式简化模型就可精确描述,建立的数学模型如下:

式中,ax,ay,by,cx,cy,dx,dy,ex,ey,fx,fy是12个待确定的参数。
需要6组已知的点。为了精确,这里采用更多的点,用最小二乘法确定这12个参数。
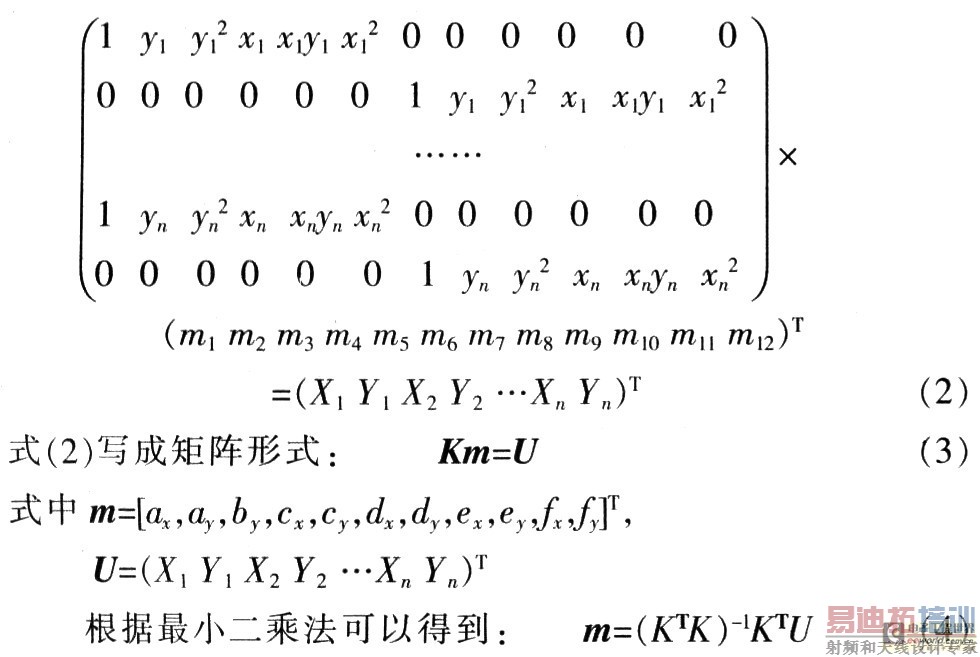
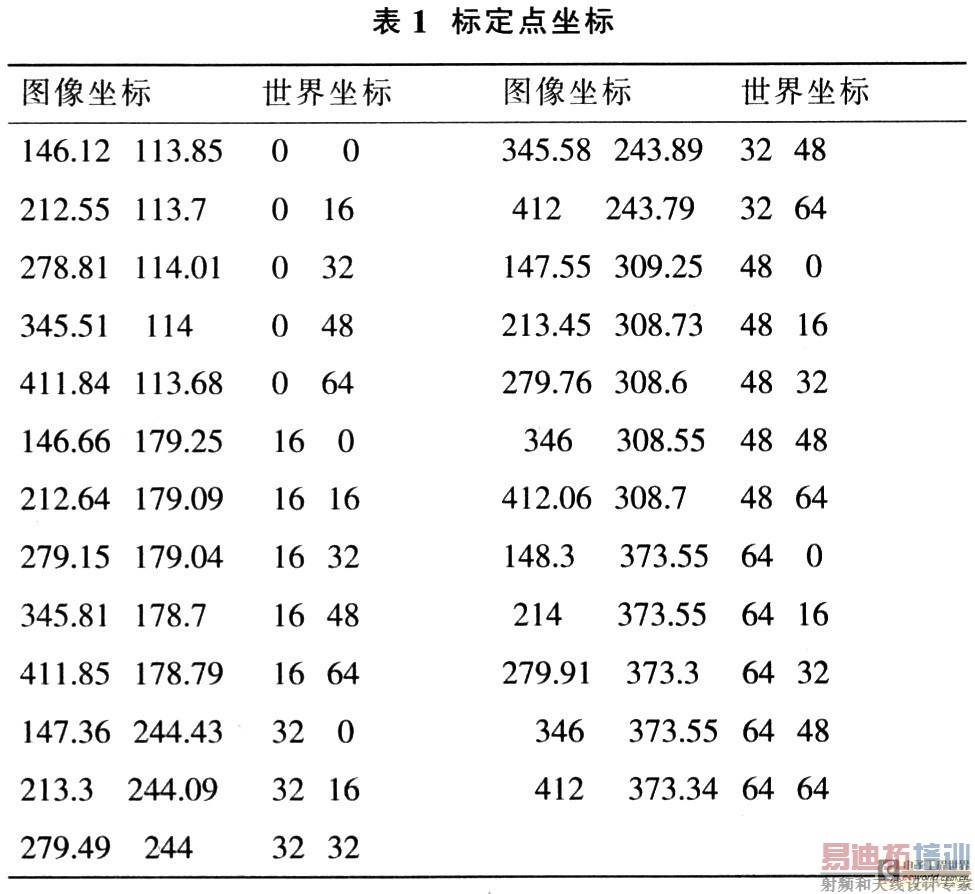
实验中选取25个点,应用灰度重心法提取标定点图像坐标,如图4所示,对应的世界坐标在定义的坐标系下是已知的,则得到表1。
用Matlab编程,求得:
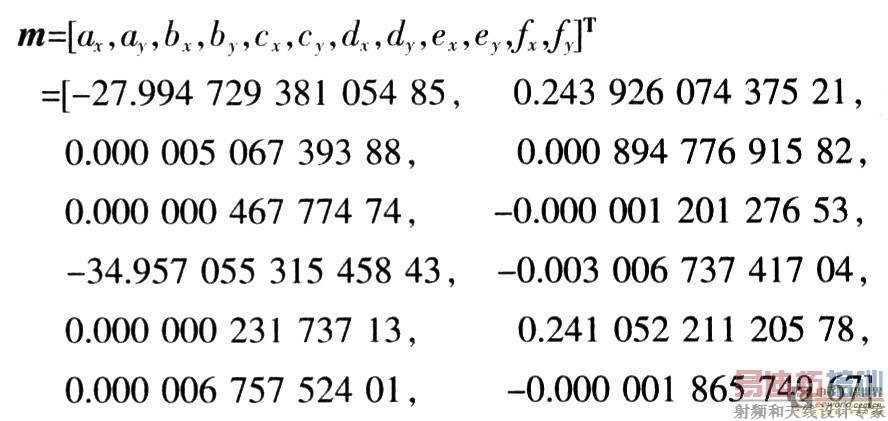
求得相机转换矩阵.便可由罔像上任意点的坐标得到实际坐标。
2.2 图像处理
得到相机转换矩阵后,最重要的是得到两个激光断点处的图像坐标。实验中发现,采集的钢板图片中罔像较为黑暗区出现亮点,这些亮点属于噪声,需要进行中值滤波,以防止后面的点运算出错而得到错误的目标区域。
滤除噪声后,还需识别出激光线。激光线与背景区别较大,激光线的灰度值是255,而其他部分的灰度值远小于255。为有效识别出激光线,使激光线上的像素与其他部分像素的灰度值有非常明显的区别,选择阈值变换的处理方法,使激光线上的像素灰度值为255,其他部分的像素灰度值为0。便可提取钢板激光断点处的图像坐标,其算法如图5所示。
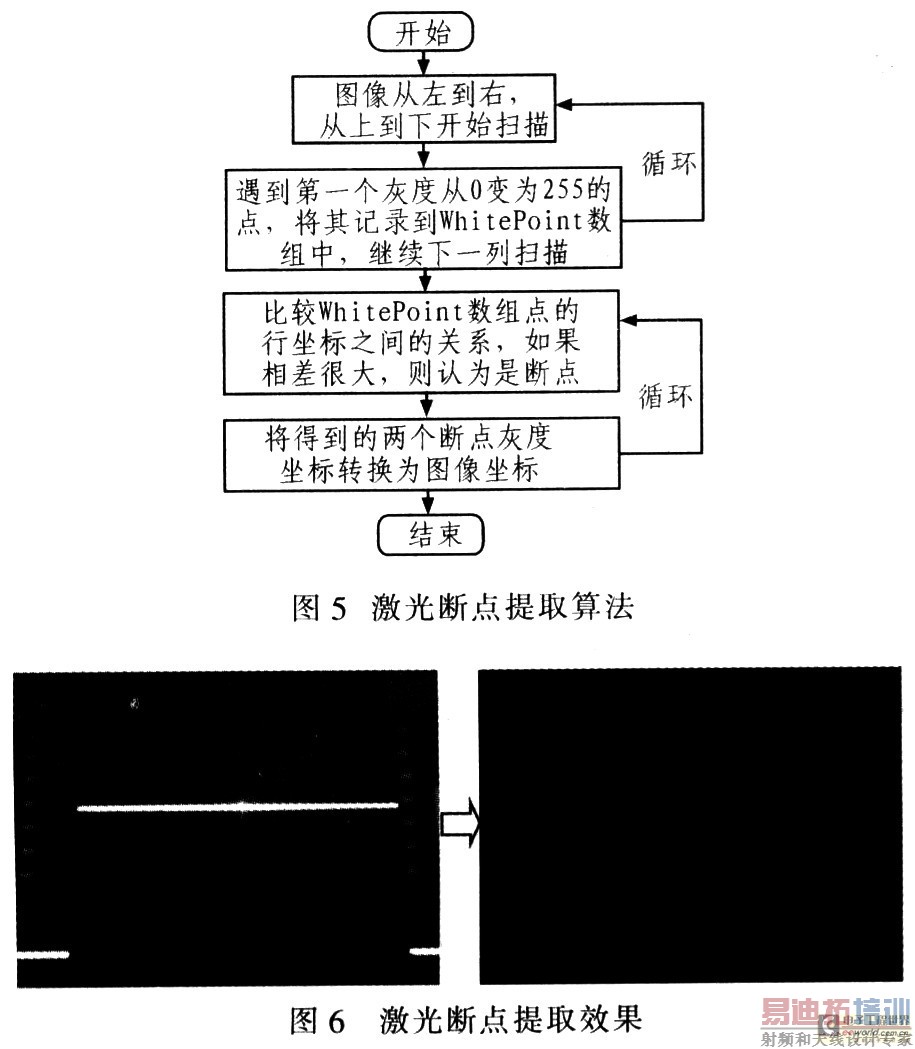
首先扫描图像像素,从左到右逐列扫描,提取所有激光线上的第1个白点,将其存到数组中,然后前后对比数组中的数据,如果发现行之间跳动很大,则认为是断点。图6是得到的激光断点效果图。
3 钢板宽度测量
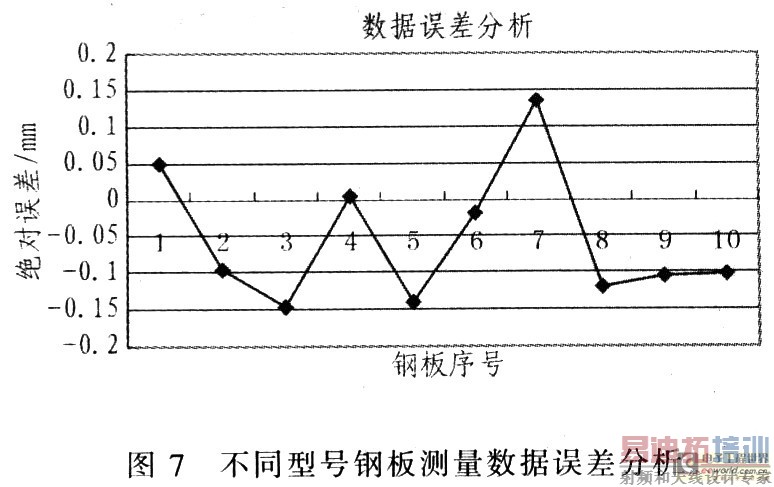
由于系统在激光面上进行标定,因此可不必考虑钢板厚度变化对结果造成的影响。又由于钢板现场有凹槽的固定,不必考虑钢板倾斜的影响。为验证实验结果,采用10种不同的钢板,分别测量,得到表2所示的数据。
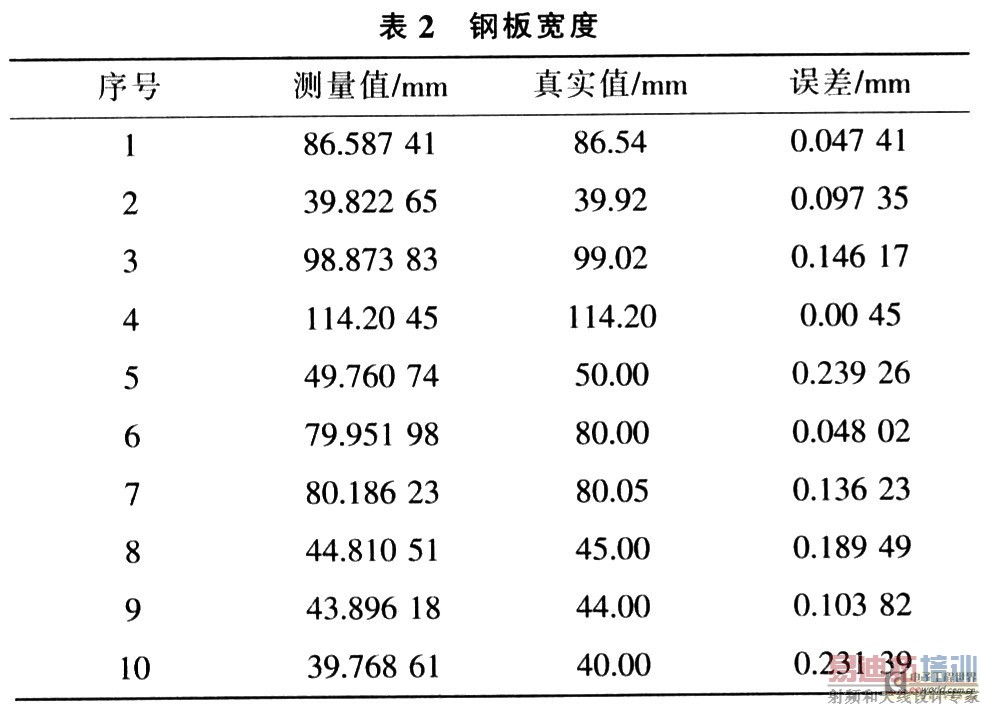
将其更直观地在图7中显示,由图可看到,与真实值相比,虽然有一定误差,但测量效果是理想的。存在误差的原因有光学镜头畸变引起的测量误差、量具误差、环境误差、方法误差等。
4 结束语
结合线性结构光和CCD摄影测量原理提出一种新的简单易行的钢板宽度测量系统。用激光器发射线性结构光投射到钢板宽度方向,由于钢板具有一定的厚度,因此在钢板两侧形成两个断点,利用CCD摄像机获取整块钢板的图像,并经高速图像采集卡将图像A/D转换后输入计算机,然后经图像处理获取钢板两侧激光断点的图像坐标,通过摄像机标定技术,转化为钢板的实际坐标,进而得到钢板的宽度。系统测量准确,简单易行,成本较低,稳定性好,在工业现场中具有一定的实用价值。
上一篇:基于汽车CAN总线的老化测试系统的设计
下一篇:电液伺服阀自动测试方法的研究

