- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
霍尔式胶印机旋转编码器设计
录入:edatop.com 点击:
引 言
实现胶印机印刷工艺过程的程序控制系统(PLC)需用多个传感器对纸张位置、旋转角度进行检测,传感器数量的增多给安装、调试和使用造成诸多不便,使设备的可靠性降低,电气控制系统的成本增加。分析胶印机的功能和机械传动系统发现,胶印机的合压、打码、拨码、喷粉和双回转功能属顺序控制,可通过检测收纸辊的旋转角度,实现程序控制。考虑到胶印机存在油、墨、水和落尘污染,又属连续运行的苛刻应用环境,磁敏型传感器较为适合,但对控制工位相对少的胶印机来说,选用旋转编码器" title="磁旋转编码器" target="_blank">磁旋转编码器
又显得价格昂贵。因此,基于开关型霍尔电路设计了霍尔式胶印机旋转编码器系统(以下简称霍尔旋转编码器),使传感器的安装、调试、布线简化,节省了PLC的输入接口资源,在胶印机控制系统中的应用取得了成功。
1 霍尔旋转编码器原理框图
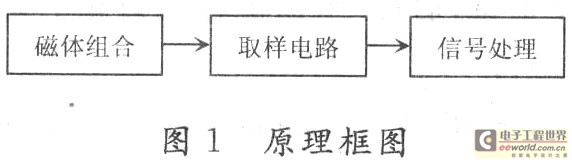
霍尔旋转编码器主要由旋转磁铁组合、取样电路和信号处理电路等部分组成,如图1所示。其中,旋转磁铁组合安装在胶印机收纸辊上,霍尔旋转编码器电路部分固定在机体上,敏感面对准磁极,两者间距小于5 mm,对收纸辊的旋转角度进行取样。因磁极的位置是确定的,所以取样信号是绝对位置量。如果取样电路具有识别印刷工艺起点和位置顺序控制点的能力,那么印刷的过程就能通过一个传感器的多点取样,实现程序控制。取样的基础是基于霍尔电路A3144,显然单一霍尔芯片不能实现包括起始点和顺序点的取样,需要对取样电路进行特殊设计,以满上述要求。取样电路获取的位置信号送信号处理电路,经软件系统对信号进行判断处理,确认后输出编码信息。
2 取样电路系统设计
2.1 双霍尔取样系统结构与原理
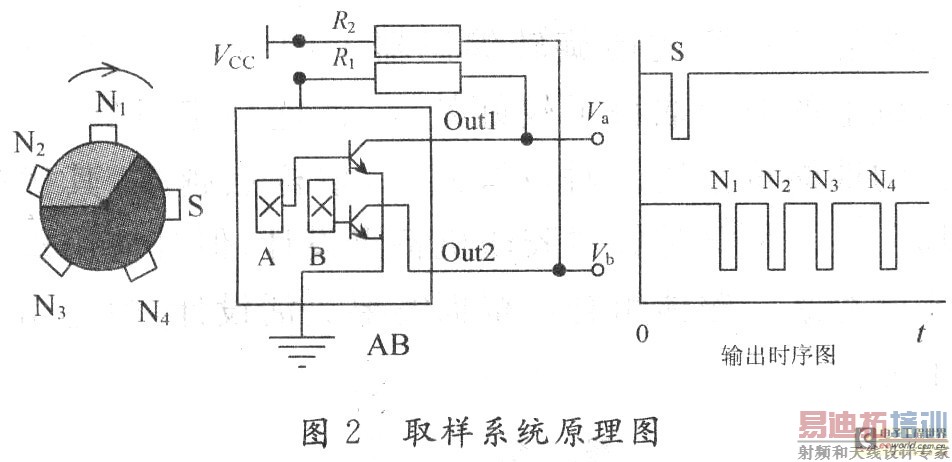
根据开关型霍尔电路原理,霍尔芯片只对一个方向的磁场有效,这就是说霍尔芯片的一个感应面为磁体的s极敏感,那么另一面一定是N极敏感,假设这两面分别叫S面和N面。将两个开关型霍尔芯片A和B的相同敏感面(例如N面)相对,A在前,B在后叠放,组成一双霍尔取样电路AB。芯片A的输出定义为Va,芯片B的输出定义为Vb,显然对来自同一方向的磁体,芯片A对S极敏感,芯片B对N极敏感,即S极触发双霍尔AB,则Va输出,N极触发AB,则Vb输出,参见图2。这种设计使取样芯片组对两个磁场方向都敏感,因芯片独立输出,具有识别磁极的能力。由于磁体组的S极、N极有位置间隔,所以Va,Vb信号在时间上不重叠。当S,N1,N2, N3,N4旋转一周顺序触发AB时,芯片A将输出一个脉冲,称之为“起始点”或零信号;芯片B将输出四个脉冲,称之为“顺序点”信号。基于这种思想设计取样电路,实现了对旋转磁体组各磁极的识别功能,尤其关键的是能确定印刷过程的起始点。
2.2 胶印机磁体组合设计 .
用于胶印机的磁体组合由5块稀土磁钢构成,其中一个磁体的S 极朝外且对应印刷“合压”位置,另外四个磁体的N极朝外,分别对应“打码”、“拨码”、“喷粉”和“双回转”工艺过程位置。因设备间存在差异,“打码”、 “拨码”位置可同步调整。磁铁组合安装在胶印的收纸辊上,每完成一次印刷过程,收纸辊旋转一周,通过检测磁体位置,实现了对胶印机印刷过程的程序控制。
3 霍尔旋转编码器电路设计
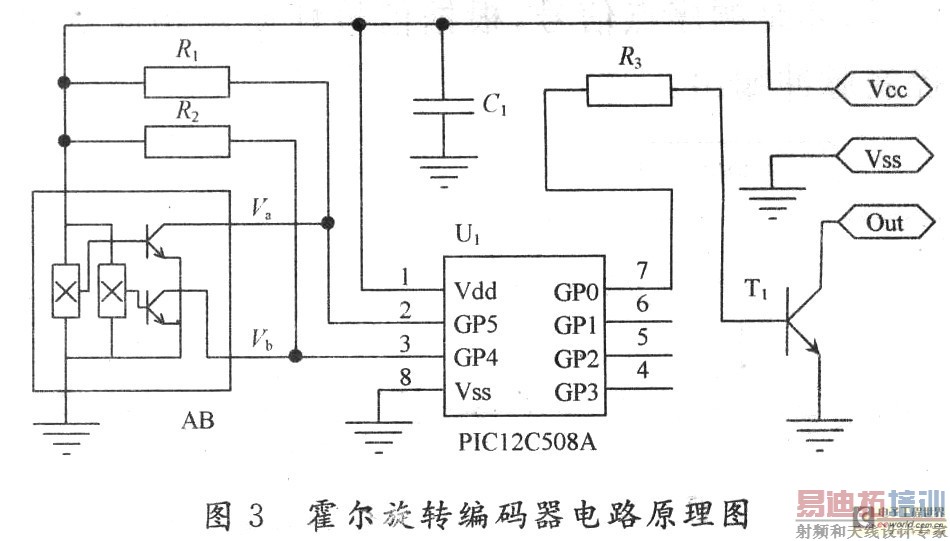
编码器电路的核心采用了Microchip Technology Inc,生产的PIC12C508A微控器。它基于COMS设计,采用RISC结构,片内程序存储器EPROM和数据存储器RAM,集成了上电复位电路 (POR)、时钟振荡器(INTRC)、看门狗定时器(WDT)等功能单元,具有小型化封装(8-Lead SIOC)、低功耗(2 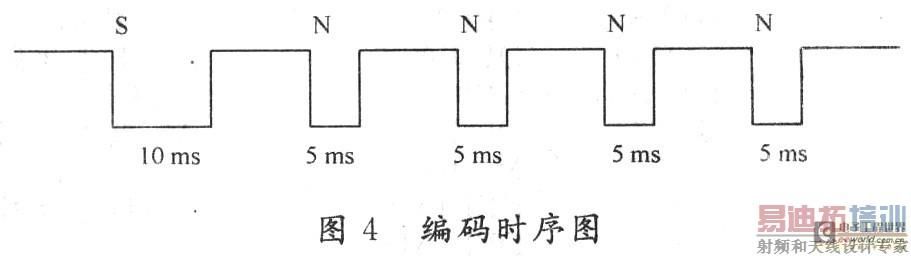
取样轮每旋转一周,软件系统完成一个编码序列转换。编码脉冲低电平宽度由软件决定,与旋转速度无关,而高电平宽度则由磁体N极间隔决定。因此一个完整的编码序列包含了起始点、顺序位置间隔和旋转周期三个方面的信息。
4 软件系统设计
PIC12C508A微控器,采用精简指令集系统,除跳转指令外绝大多数指令周期为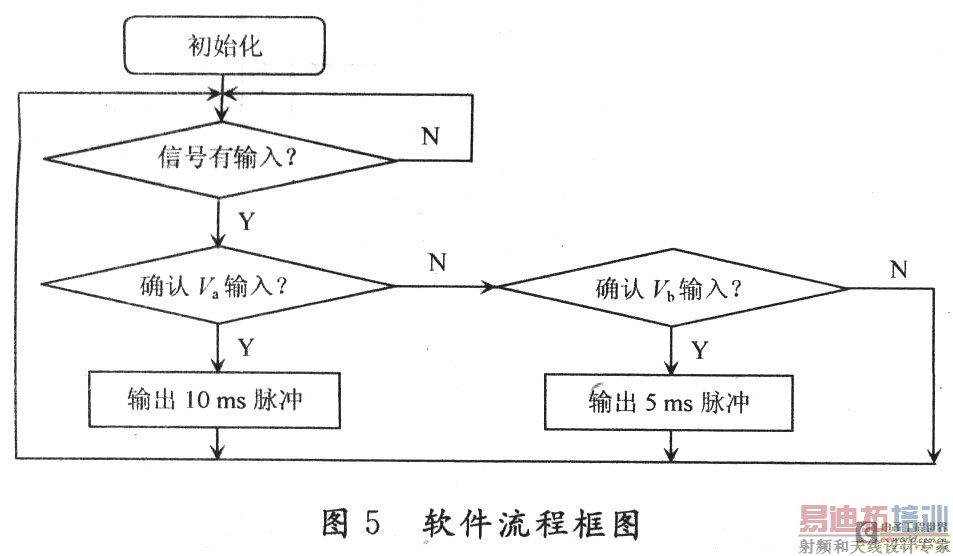
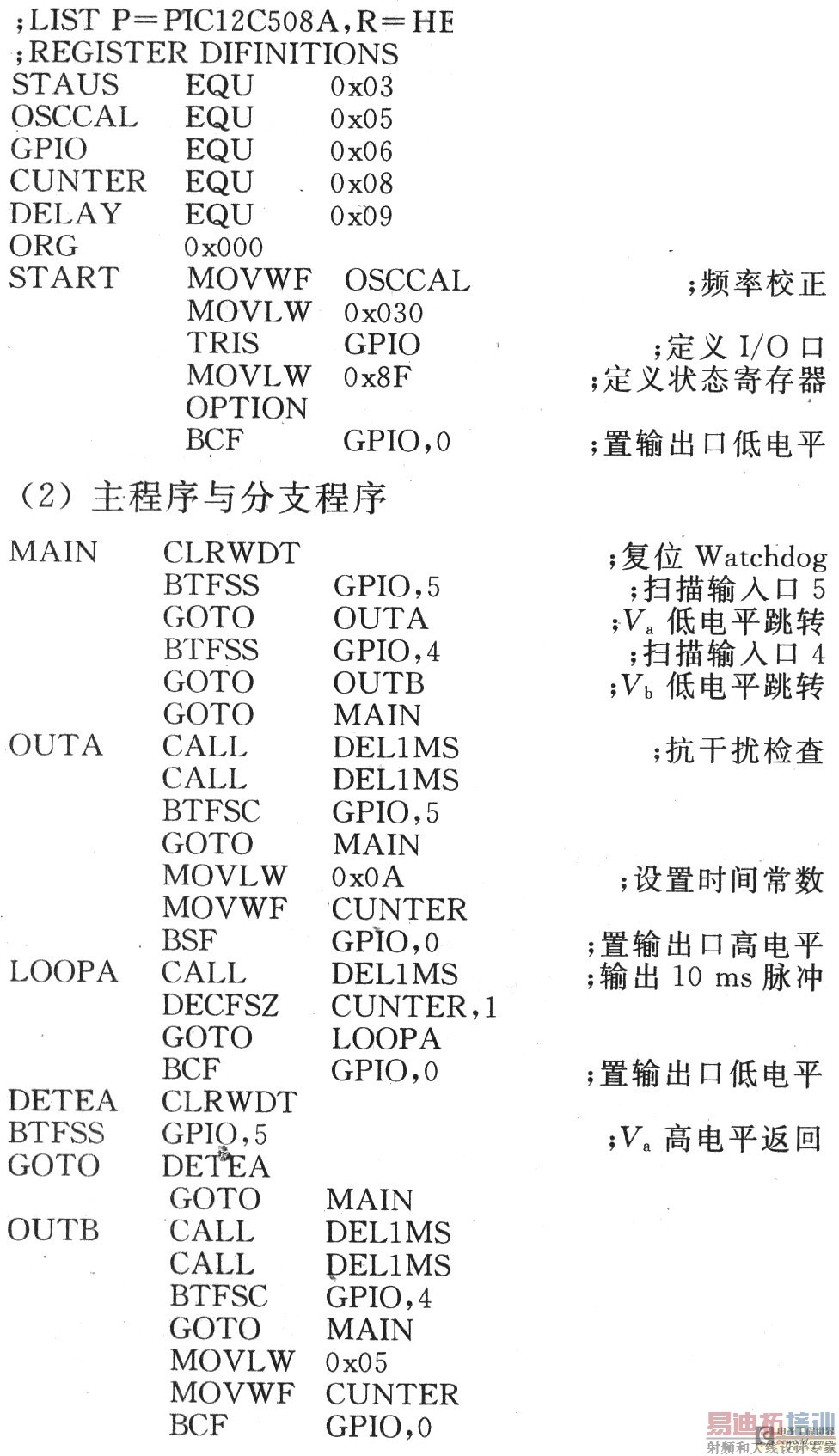
4.2 软件系统程序清单
软件设计包括初始化程序、主程序和延时子程序,参考程序清单如下。
(1)寄存器定义与初始化程序
5 结 语
霍尔旋转编码器具有开关型霍尔传感器的优点,它基于简单实用的原则设计,直接获取位置信号,原理上与结构复杂精密的磁旋转编码器不同。该系统在胶印机上的应用取得了较好效果,性能稳定可靠,具有优异的性能价格比。对位置测量,取样点越多,其优越性越明显。尽管是针对胶印机特点设计,但其应用却具有普遍意义。磁体组合可根据需要灵活设计,为它用提供了方便。

