- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
虚拟原 际跤牖电一体化技术的结合
录入:edatop.com 点击:
本文展示了使用嵌入式分析工具的现代计算机辅助设计(CAD)系统如何实现机电一体化设计。
用户总是要求我们提高所设计的机械的性能,同时减少资金成本。为了达到这两个矛盾的目标,我们将注意力放到在机械设计方面有巨大潜力的机电一体化上。
本文审视了当今与机电一体化结合的计算机辅助设计(CAD)工具如何帮助您制造更好的机器。那么,您需要设计制造一台新的机器要,并且您确信机电一体化的设计方法及虚拟原型技术是正确的途径,但是该从哪里着手呢 让我们先来看更为简单的取放机。
在机电一体化设计中,三个设计团队(机械,电机与控制)并行工作。不过,在机械团队完成设计前,电机与控制团队需要预先得到有关机械的信息。虚拟原型技术可以预先提供机械信息。通过将3D CAD系统与一个运动和结构分析工具,以及一个虚拟控制器相连接, SolidWorks公司与NI公司创建了一个真实的机电一体化设计环境。使用这些工具并不表示机械设计过程中的繁重工作减少了,而是工作量在整个设计周期中由设计团队分担了。
初次共振实验。虚拟原型技术的巨大价值在于,它允许您出现并校正设计错误,而不会出现制造实物样机所带来的资金耗费与时间延迟。
虚拟原型技术设计过程
经常失败与早期失败是虚拟原型技术设计的必经之路,失败的方式是在设计过程中——而不是之后。所以您该如何‘失败’而仍旧成功?诀窍是在正确的事情上失败,确定什么是您机械的关键性能指标(KPI’s),并将这些作为随后测试的参数与目标。那么,让我们看看取放机并领会虚拟原型技术如何在设计过程引导我们。
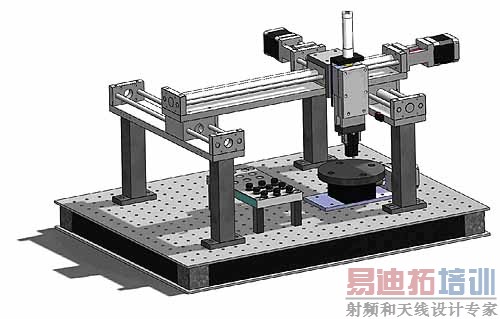
取放机
运动轮廓是所有机械的基石。最简单的情况是将物体A从 B处 移到 C处。但是在某些情况下,您从B到C的最佳方式并不那么显而易见。一步运动还是两步?凸轮还是伺服?利用CAD可以快速地安排机械的运动部件,并检查冲突与运动范围。由于大多机械并不是从草图开始的,最初的CAD组装很可能是3D模型与布局草图或是结构图的混合体。
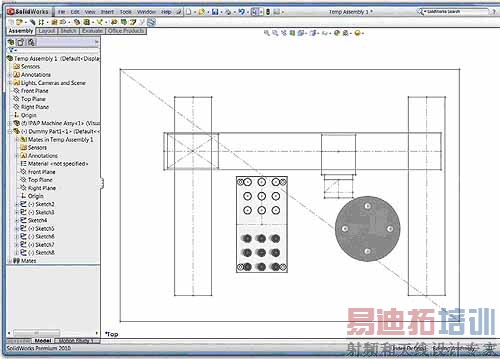
取放装配布局
即使只有如此简单的几何形状,SolidWorks仍可以基于草图或用户定义的部分计算出近似的力与转矩。我们现在可以将这些要求告知电机工程师,他们会对马达与驱动提出建议。再者,我们有可能借助于软件的优势直接从3D信息中心 (拥有超过一百万个模型)或者制造商的网站下载马达与驱动的CAD模型。
装配马达与驱动的取放布局
最初的设计迭代提供力的大小来确定“最初估计”的马达和驱动尺寸。使用装配图中包含的马达与驱动CAD模型,运动仿真能够快速地重复运行来完善马达与驱动需求。当机械设计成熟并且CAD装配变得更加完整,运动分析软件可以周期性地重复运行,确保实物样机制造时不会出现意外。
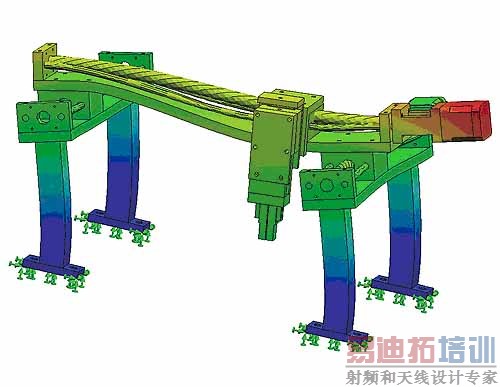
当马达尺寸确定后,我们可以将注意力转移到机械的性能与其结构上。典型的机械KPI是其位置公差,就机械学的层次来说,是由机构刚度与驱动顺性决定的。对我们的取放机而言,我们需要一个与较轻的,但很硬的移动结构结合一个非常刚性的支持结构, 驱动以及连接系统,它们能够充分满足机械的需求。我们提到充分,是因为马达和驱动的顺性紧密地与花费联系在一起。
使用SolidWorks集成的仿真套件,我们可以从运动分析中取出力与转矩,并将其放入结构仿真中来评估机械强度,耐久性以及柔韧性。现在,机械工程师可以回答有关机械性能的基本问题了。在任何运行速度下机械是否会共振?机械是否超出设计标准?我们是否能减少机械的重量以及由此导致的花费?机械部件的使用寿命是多久?这不是只做一次的仿真,而是当机械开发时,不断运行以发展与改进,不断为机电一体化团队提供最新、精确的信息,以根据具体情况作出设计决定。我们现在完全参与设计迭代循环,对于一个好的设计来说,“如果出现情况怎么办”可以被提高为“没问题”的设计。
目前为止,我们只考虑了机械与电机工程师,而机电一体化设计模式是关于并行工作的三个工程团队。那么虚拟原型技术如何帮助控制工程师?我们已经看到了虚拟机械如何在CAD系统下被驱动,但是控制工程师想要的是一个虚拟控制器,能够直接与CAD几何图形对话并驱动运动分析,如同用于SolidWorks的LabVIEW NI SoftMotion所能实现的。
通过马达尺寸以及其它部件的确定,虚拟控制器能够直接与CAD图形对话并驱动运动分析。
现在,控制工程师可以驱动虚拟机械,微调控制代码并实时观察机械行为。控制工程师可以确保运动轮廓正确,调查有关机械性能顺性的效果,并留意设计一些安全装置,例如传感器或者限位开关。对机械与电机工程师来说,因为虚拟机械是由“真实”代码驱动, 新增的好处是,机械工程师可以确定“真实”的力与转矩,而电机工程师可以估计“真实”的马达与驱动需求。
上一篇:基于VB的数据采集卡的应用
下一篇:GPRS电力远程抄表系统应用方案

