- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于各向异性磁阻传感器的车辆监测系统设计
录入:edatop.com 点击:
摘要:针对感应线圈式车辆检测器的不足,设计了一种基于各向异性磁阻传感器(AMR)的非接触式智能车辆监测装置,能监测车辆的到达时间、类型、方向和车速等基本信息。系统主要由采集系统和显示系统两个独立的部分组成。给出了系统的硬件设计以及程序流程图,并利用实验数据绘制曲线图,表明了设计原理和计算方法正确性。
汽车大都属于铁磁构造,在地磁场中可以看做双极性磁铁,汽车磁场会对地磁场产生扰动,引起地磁场磁力线的畸变。汽车在静止及行驶时运动速度和方向不同,对地磁场的扰动也不同,据此可通过检测磁场扰动的特性,判断车辆信息及行驶状态[1-2]。传统的监测方法是通过感应线圈式车辆检测器进行探测,检测精度高,性能稳定,但是探测线圈体积大,安装维护比较复杂,工程量大,且易于损坏。高灵敏度、高精度磁阻传感器的出现为车辆监测提供了新的手段,磁阻传感器可检测动态、静态的车辆,对车速估计、车型分类等都具有较好的效果。本文介绍了一种基于磁阻传感器HMC1043的智能车辆监测系统。
1 系统设计
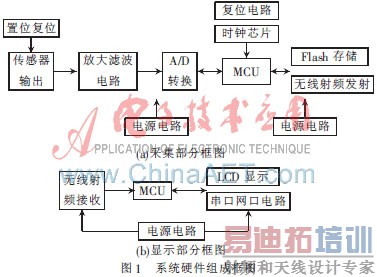
系统主要由数据采集装置和显示装置两个独立部分组成,两个数据采集装置对应一个显示装置。数据采集装置由传感器电路采集磁场信号、典型的信号处理电路将磁场信号转换成数字信号,MCU采集、压缩数据,将数据通过射频发射模块发射。射频接收模块接收两个采集装置发送的数据,送入MCU进行计算、识别匹配,并控制LCD显示。通过串口和网口、还可以将接口数据进一步发送给计算机存储、处理。
1.1 硬件总体设计
数据采集装置和显示装置的硬件组成框图如图1所示。
1.2 HMC1043磁阻传感器原理及使用
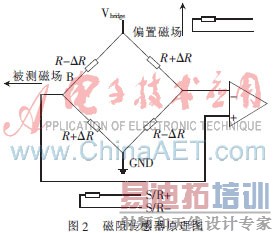
各向异性磁阻传感器AMR是在强磁场下将铁镍合金薄膜沉积在硅衬底上制成,沉积的时候薄膜以长条带的形式分布。在有电流通过薄膜带时,施加一个被测磁场B,则磁化强度方向与电流方向的夹角θ发生变化,引起电阻阻值变化(ΔR/R)。四个这样的磁阻接成一个惠斯通电桥,位于磁场B相对位置的两个磁阻阻值增加,另外两个磁阻的阻值减小,在其线性范围内,电桥的输出电压与被测磁场成正比。图2为磁阻传感器原理图[3-4]。HMC1043是霍尼韦尔公司的三轴AMR传感器,由三个相互垂直的这种惠斯通电桥组成,能测量空间三维方向的磁场,测量范围±6G,分辨率120μG。
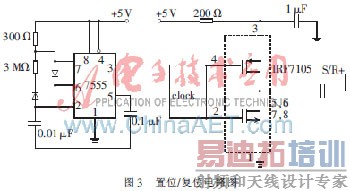
在有强磁场干扰时,磁阻传感器的精度和灵敏度下降,利用强脉冲电流产生强磁场使磁阻的磁畴重新沿着敏感轴方向有序排列,恢复AMR传感器的最佳特性[4]。HMC1043的SR+和SR-置位/复位引脚之间有一个2.5Ω的铁磁性电阻,可用7555定时器产生周期时钟信号,控制IRF7105产生置位/复位脉冲电流,如图3所示。
1.3 信号处理电路设计
磁阻传感器输出的模拟信号最小只有不到0.5μV,需要放大电路进行放大、滤波,然后输入A/D转换电路,再将得到的数字信号送入控制芯片MCU,通过射频发射模块发射到接收端。射频接收端接收到数据后由MCU按照指定的算法计算、分析数据,计算车速,匹配车型,辨别方向,并把通过时刻、车型、方向、车速一起送入LCD显示模块显示,也可通过相关的接口将数据送入计算机存储。经过计算传感器输出的模拟信号放大140倍,适合+2.5V参考电压的16位精度A/D转换芯片。运算放大器OPA4376,最大25μV偏移电压、5.5MHz频宽、7.5nV/![]() 噪声密度,引入噪声很小;小于950μA静态电流,+5V单电源供电,有利于系统降低功耗。在放大器的反馈回路接入电阻R(12.4kΩ)和电容C(150pF)组成截止频率50kHz的低通滤波器,对反馈输入信号低通滤波,缩小信号带宽,滤除高频噪声。
噪声密度,引入噪声很小;小于950μA静态电流,+5V单电源供电,有利于系统降低功耗。在放大器的反馈回路接入电阻R(12.4kΩ)和电容C(150pF)组成截止频率50kHz的低通滤波器,对反馈输入信号低通滤波,缩小信号带宽,滤除高频噪声。
ADS8343是一个低功耗、16位精度的模数转换芯片,转换速率100kHz,+5V直流电源供电,参考电压设置+2.5V。使用其中三个通道把采集的三路模拟信号转换为数字信号,空闲时进入关断模式,降低功耗,适用于电池供电的低功耗系统。
1.4 MCU控制电路
P89LPC932A1是增强型51处理器,指令执行时间2~4个时钟周期,选用7.328MHz外部无源晶振作为时钟,适用电压范围宽,能工作在低功耗状态,又能获得6倍于普通51处理器的处理速度。+3.3V直流电源供电,使用ICP在电路编程,连接VDD、VSS、P0.5、P0.4、RST,5个引脚实现编程。系统闲置时自动进入掉电模式,降低功耗。MCU配有存储模块、复位电路和时钟电路。
FM24CL04是Ramtron公司的一款4KB(512B×8)的非易失性存储器,使用两线I2C通信协议,标准8脚封装。地址引脚A1、A2接地,其访问地址是0xA0或者0xA1,其中0xA0寻址前256B(一页),0xA1寻址后256B。P89LPC932A1的SCL、SDA是开漏输出,这两条线上各接一个10kΩ上拉电阻,与FM24CL04的SCL、SDA引脚连接。WP与CPU的I/O引脚相连,通过I/O控制芯片的写保护。
1.5 射频发射和接收模块
PTR8000+是基于RF905射频通信芯片的嵌入式无线通信模块,接收、发送均可。+3.3V直流电源供电,掉电工作模式下静态电流2.5μA,通过SPI接口连接到CPU。系统使用了四种工作模式:配置模式、SPI编程模式、发射/接收模式和掉电模式。在配置模式下,CPU通过SPI接口配置PTR8000+工作参数,然后进入发射/接收模式通过SPI接口与单片机数据通信,有CRC校验。闲置时进入掉电模式,降低系统功耗。
2 系统程序流程图
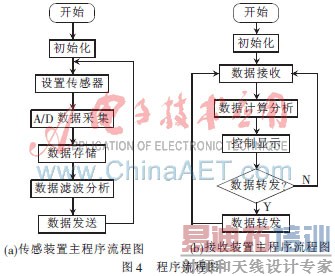
系统软件功能实现由C语言编写调试,主要实现数据的采集、分析计算以及数据的转发显示等功能,主程序流程图如图4所示。
3 试验数据和软件计算
传感器采集到X、Y、Z 三维轴方向上的磁场强度,空间磁场强度可通过矢量合成公式求得:![]()
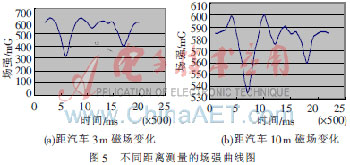
图5是根据一辆桑塔纳轿车正向通过时分别在3m、10m远处测得磁场数值绘制的曲线图。随着距离增加,磁场变化迅速减弱,所以此监测装置适合安装在距车辆10m以内的地方。
3.1 车速计算
从图5中可以看到,车辆通过传感器时磁场变化幅度并不总是相同的,地磁场畸变最大处发生在发动机通过传感器的时刻[5]。在相距30m的同侧路边安装两个传感装置,CPU分别记录畸变最大值的时刻,并发送给接收装置。两个时刻时间差值就是发动机通过30m距离所用的时间,根据ν=Δs/Δt,显示装置CPU计算出车辆行驶速度ν。时钟芯片选用时间精度百分之一秒的PCF8353,通过CPU的I/O接口控制。
3.2 方向判断
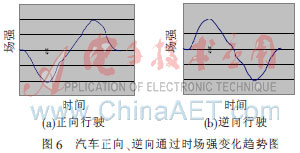
车辆分别从正向和逆向通过时,磁场扰动幅值相同,但是正向通过时磁场先减弱然后增强,逆向通过时相反,磁场先增强然后减弱。车辆驶过时地磁力线向车辆弯曲,如果车辆迎着磁轴方向驶来(逆向),地磁力线向磁轴方向弯曲,磁场增强,如图6所示。计算时滤掉磁场本身的微小波动和远处车辆的干扰,判断地磁场增强还是减弱,得出车辆行驶方向。
3.3 车辆类型判断
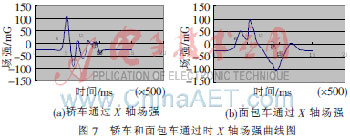
不同类型的车辆驶过,对地磁场的扰动各有特点[5],例如面包车通过时,X轴磁场变化频率低;轿车通过时,X轴磁场变化频率较高,但是能量集中在第一个波峰和波谷,如图7所示。将不同类型的磁场扰动模式存放到数据存储器里,对测得的磁场数据识别、匹配,判断通过车辆的车型。
此监测装置灵敏度高,稳定性和可靠性良好,温度范围宽,能准确计算车辆速度、方向并显示到达时间、车型等信息。设计采用低功耗元件,无工作时自动进入掉电模式进一步降低功耗,体积小巧,易安装,可以完全替代传统的电流线圈的探测模式。测量过程无接触,通过无线射频发射模块发射数据,实现了较远距离的监控。装置可安装在停车场、高速路口、街道旁边,能实时监测车辆信息,方便智能。
参考文献
[1] Moon Ho Kang,Byoung Wook Choi,Kyung Chul Koh,et al. Experimental study of a vehicle detector with an AMR sensor[J]. Sensors and Actuators A,2005,118(2):278-284.
[2] 李希胜,于广华.各向异性磁阻传感器在车辆探测中的应用[J].北京科技大学学报,2006,28(6):587-590.
[3] 裴轶,虞南方,刘奇,等.各向异性磁阻传感器的原理及其应用[J].仪表技术与传感器,2004(8):26-27,32.
[4] 乔建忠,李艳,文丰.一种各向异性磁阻传感器在车辆探测中的应用[J].传感器与微系统,2009,28(5):106-108.
[5] Jose Pelegri Sebastia,Jorge Alberola Lluch,J. Rafael Lajara Vizcaino. Signal conditioning for GMR magnetic sensors Applied to traffic speed monitoring GMR sensors[J]. Sensors and Actuators A,2007,137:230-235.
上一篇:基于嵌入式的电缆故障检测仪设计
下一篇:汽车胎压监测系统发射模块设计

