- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
信号链基础之调节滤波器各 件以降噪
录入:edatop.com 点击:
这种输入不匹配 (△C) 形成截止频率误差,使共模噪声eN差动进入INA输入,之后被增益输出,成为误差电压。方程式1-3显示了到达输入端的共模噪声量:
假设传感器信号Vsensor的频率远低于所有共模滤波器的噪声截止频率(即fC ≥ 100*fsensor),并且RS1 = RS2,则转换为差动噪声信号 (eIN) 并成为 VIN组成部分的共模噪声信号(eN)大小为:

方程式4进一步表明,通过向INA333注入一个100 mVpp、100 kHz共模误差信号,且1.6 kHz滤波器截止频率 RC不匹配为10% 时,其所产生的误差如下:
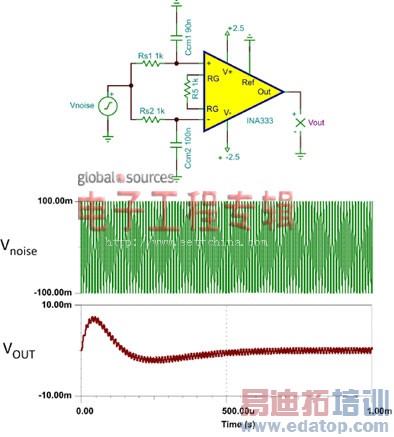
图4:共模滤波器RC不匹配引起的INA333输出误差仿真(增益为101)
图5显示了一种更好且更常见的输入滤波方法,其改进是在仪表放大器输入之间添加了一个差动电容Cdiff。
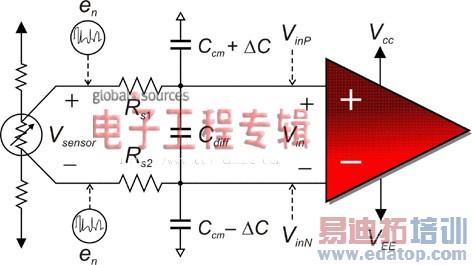
图5:添加差动电容(Cdiff)提高共模噪声抑制效果
添加这种电容并没有彻底解决问题,因为必须按照如下两个标准对Cdiff进行调节:
1、差动截止频率必须足够高,以远离信号带宽,从而实现充分的滤波稳定。
2、差动截止频率必须要足够低,以将共模噪声降至可接受水平,让仪表放大器CMRR能够实现剩余噪声抑制,最终达到可以接受的SNR。方程式5给出了进行这种调节的一般原则:
上一篇:设计电源管理电路时必需考虑的散热问题
下一篇:有效利用IP,加速创新

