- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
示波器的LIN、CAN和FlexRay串行总线调试
录入:edatop.com 点击:
为了改善系统通信效率,降低成本,目前所有的汽车设计都采用了大量的串行总线通信协议。I2C 和SPI协议通常应用在电子控制单元(ECU)的芯片间通信。对于各种汽车子系统(例如舒适性控制系统、防盗锁、传动系统和引擎控制)之间的长距离串行通信和控制,CAN、LIN和FlexRay协议是当今汽车行业中最常见的串行总线应用。
基于主从关系的LIN串行总线主要用于对安全性要求不高的应用,例如座椅和车窗控制。CAN串行总线采用差分事件触发,其噪声抗扰度高于单端LIN总线,二十多年来一直用作汽车的主要控制总线。FlexRay串行总线采用差分时间触发和同步确定性时间表。作为新兴的串行总线技术,FlexRay应用在部分高端汽车中,主要适用于对性能和安全性要求很高的系统。
然而,串行总线通信经常受到由汽车内部的非理想环境造成的信号完整性问题的影响,包括点火系统和随机系统噪声的信号干扰,这有时会在关键通信周期中产生误差。尽管串行总线协议分析仪非常适合测试和监测串行总线数据在更高级协议层和应用层的传输,但它们无法测出您的汽车串行总线信号(物理层)的完整性/质量。
当前的一些中/高性能数字存储示波器(DSO)提供LIN、CAN和FlexRay总线解码和触发能力,可在协议层和物理层之间建立时间关联链路。
图1显示了Agilent 3000 X系列示波器同时捕获和解码CAN和FlexRay总线。显示屏底部是每条总线的时间关联解码轨迹,位于已捕获的物理层波形下方。示波器显示屏上半部分显示了业界唯一的时间交叉“列表”显示,有时称为事件表。这种数据格式更接近于传统的协议分析仪。
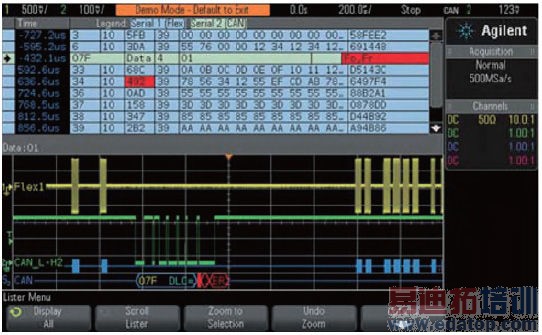
图1:Agilent InfiniiVision 3000 X系列示波器同时捕获和解码CAN和FlexRay串行总线。
上一篇:使用示波器进行功率测量的7大秘诀
下一篇:示波器探头浅谈

