- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
关于PC104与C8051F120的水下机器人环境监测系统设计
录入:edatop.com 点击:
定时器中断程序如下。
3.4串口通信模块
串口通信模块主要是负责和工控机进行通信,当PC104需要传感器数据的时候,单片机就通过串口把数据发给PC104,PC104在把信息发送给岸上的微型计算机,供用户进行显示。图6是串口中断程序流程图。
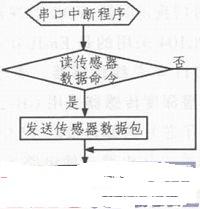
串口中断程序如下。

4视频图像的采集和传输
H264采用"回归基本"的简洁设计,不用众多的选项,获得比MPEG-4好得多的压缩性能;H.264加强了对各种信道的适应能力,采用"网络友好"的结构和语法,有利于对误传和丢包的处理;H.264应用目标范围较宽,可以满足不同速率、不同解析度以及不同传输(存储)场合的需求。
RTP是一种网络传输协议,RTP协议不要求底层网络提供可靠的数据传输服务,它自身也不对报文丢失、重复和次序颠倒等差错进行处理。应用程序可以通过检测RTP报文固定头中的次序号发现传输过程中的差错。RTP具有较好的实时性,对于低带宽实时性要求高的场合很实用。

图7是视频结构图。PC104和微型计算机之间采用的是C/S模式。模拟摄像头的信号通过视频采集卡送入到PC104中,PC104通过H264压缩后,然后通过RTP传输给微型计算机,微型计算机接受到视频数据后进行解压显示。
上一篇:耐压测试仪系列操作方法
下一篇:多传感器空气流量测试系统方案

