- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
工业运动控制中的测量技术
录入:edatop.com 点击:
工业运动控制涵盖一系列应用,包括基于逆变器的风扇或泵控制、具有更为复杂的交流驱动控制的工厂自动化以及高级自动化应用(如具有高级伺服控制的机器人)。这些系统需要检测和反馈多个变量,例如电机绕组电流或电压、直流链路电流或电压、转子位置和速度。在诸如增值功能(如状态监控)等考虑因素中,终端应用需求、系统架构、目标系统成本或系统复杂度将决定变量的选择和所需的测量精度。据报道,电机占全球总能耗的40%,国际法规越来越注重整个工业运动应用的系统效率,因此,这些变量越来越重要,特别是电流和电压。
本文将根据电机额定功率、系统性能要求以及终端应用,重点讨论各种电机控制信号链拓扑中的电流与电压检测。在此情况下,电机控制信号链的实现会因传感器选择、电流隔离要求、模数转换器(ADC)选择、系统集成以及系统功耗和接地划分的不同而有所差异。
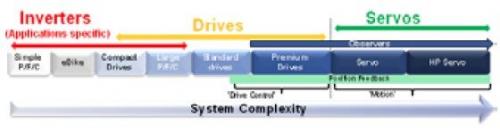
图1.工业驱动应用图谱
工业驱动器应用图谱
从简单的逆变器到复杂的伺服驱动器,电机控制应用涵盖一系列电机类型,但所有电机均包含特定功率级的电机控制系统,以及具有不同级别的检测和反馈,可驱动脉冲宽度调制器(PWM)模块的处理器。图1为应用图谱的简化图,展示了复杂度从左至右逐步提高的各种系统,首先是简单的控制系统,如无需精密反馈仅使用简单微处理器即可实现的泵、风扇和压缩机。随着系统复杂度的提高(即移向图谱的较高端),复杂控制系统要求精确反馈和高速通信接口。例如带传感器或不带传感器的矢量控制感应电机或永磁电机,以及针对图1中所示效率而设计的高功率工业驱动器(如大型泵、风扇和压缩机)。图谱的最高端为复杂的伺服驱动器,用于机器人、机床以及贴片机器等应用。随着系统复杂度的提高,变量的检测和反馈变得越来越关键。
驱动器架构系统划分
我们在设计满足各种工业运动控制应用需求的系统时可能会遇到各种问题。通用电机控制信号链如图2所示。

图2.通用电机控制信号链
隔离要求非常重要,通常对产生的电路拓扑和架构具有显着影响。需要考虑两个关键因素:隔离的原因和位置。
隔离分类的要求取决于前者。可能要求高压安全隔离(SELV)以防电击,或功能隔离以便在非致命电压之间进行电平转换,或为实现数据完整性并消除噪音而要求进行隔离。隔离位置通常由系统的预期性能决定。电机控制通常是在充满电噪声的恶劣环境中进行,采用的设计通常需承受数百伏的共模电压,可能会在超过20 kHz的频率下切换,并具有极高的瞬态dv/dt上升时间。为此,性能较高的系统和固有噪声较高的大功率系统通常会设计为具有与控制级相隔离的功率级。无论是采用单处理器还是双处理器设计都会影响隔离位置。在性能较低的低功耗系统中,通常是在数字通信接口上进行隔离,这意味着功率级和控制级处于同一电位。低端系统需隔离的通信接口带宽较低。由于高端系统要求具有较高带宽,且传统隔离技术具有局限性,因此,隔离高端系统的通信端口通常会比较困难。但是随着磁性隔离的CAN和RS-485收发器产品的问世,情况正在发生变化。
在高性能闭环电机控制设计中,两个关键的元件构成为PWM调制器输出和电机相位电流反馈。图3a和图3b展示了需要进行安全隔离的位置,具体位置取决于控制级是与功率级共享相同的电位还是以接地为基准。无论何种情况,高端栅极驱动器和电流检测节点都需要隔离,但是图3a中的隔离等级不同,这些节点只需进行功能隔离,而在图3b中,这些节点的人员安全隔离(即电流隔离)至关重要。
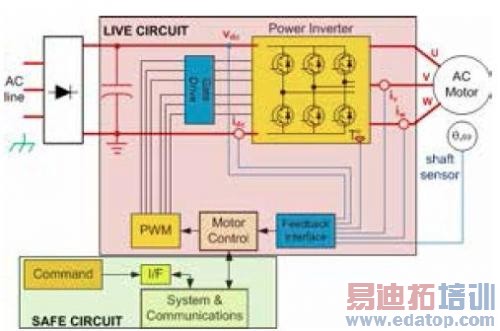
图3a.以功率级为基准的控制级
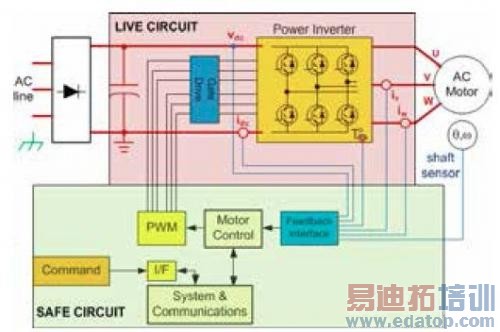
图3b.以接地为基准的控制级
上一篇:基于正交矢量放大的MRS信号采集模块设计----核磁共振信号采集模块的原理及分析
下一篇:高阻器件低频噪声测试技术与应用研究--用于聚合物钽电容的漏电流噪声研究

