- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
海洋环境地磁场三分量测量仪的设计与实现
录入:edatop.com 点击:
该系统主要完成海平面上各种信息量的采集,并计算得出需要的结果。该系统主要由以下几个部分组成:微处理器模块、传感器模块、电源模块和检测量输出模块,原理图如上。
处理器选择ST公司的基于ARM的低功耗高性能32位微控制器,采用2个陀螺仪,一个6轴地磁模块,压力传感器和温度传感器,将系统安装于舰船桅杆上,接外部电源。当舰船在海上实地测量时,随着舰船姿态的改变,陀螺仪实时检测到姿态角的信息,同时舰船所在坐标点的三分量磁场被地磁模块实时检测到,信息经过处理器,最终可以得到该坐标点处的实际地磁场信息。
3.3系统软件架构
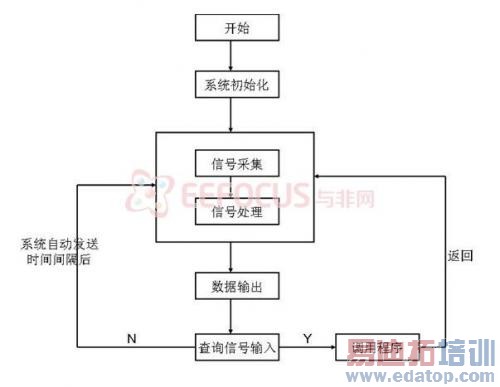
软件架构图
上图即为软件构架图。首先要进行系统的初始化,在每次断电后重新启动或者复位后进行。传感器模块感知外部信息量,其中对陀螺仪检测到的信号还要进行模数转换,随之将采集到的两组数据存储于处理器内,根据数学模型进行实时分析处理。最后将各感知的初始信号与经过处理之后的结果串口输出。
3.4 系统软件流程
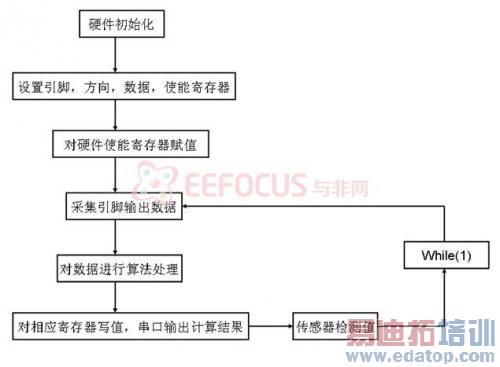
程序运行流程图
由于数据处理是不间断工作的,因此在一次数据处理完成并且输出之后,程序再次运行至采集引脚输出数据,进行第2次计算。上图为程序运行流程图。
上一篇:基于电磁感应的液体粘度测量方法研究
下一篇:莱特波特无线终端测试解决方案

