- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
海洋环境地磁场三分量测量仪的设计与实现
录入:edatop.com 点击:
3.A矩阵的变换形式
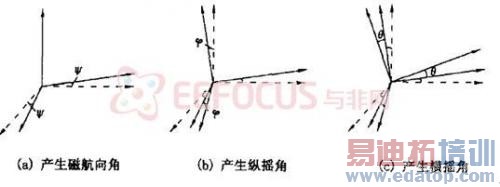
对于任意的舰船姿态,都同时包含了舰船的横摇、纵摇和航向3种状态信息,但是为了分析问题的方便,可以把这种姿态看作是舰船没有纵摇和横摇角,并且处于正北磁航向状态的时刻,顺序经历了航向、纵摇和横摇改变的3个独立阶段后形成的。亦即舰船在第一时刻只发生航向的改变,产生磁航向角  (见图1(a));然后在经历一次纵向摇摆,产生横摇角
(见图1(a));然后在经历一次纵向摇摆,产生横摇角  (见图1(c))。经历这三个状态以后,舰船的姿态就确定了。
(见图1(c))。经历这三个状态以后,舰船的姿态就确定了。
因此,可以将A矩阵写成3个矩阵 相乘的形式,即 ,其中:

4.磁场3分量获得
对于任意航向上、任意测量船姿态下,磁传感器处获得的磁场值为:
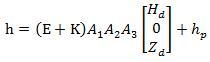 (2)
(2)
对于具体某一条测量船来说,其K矩阵和固定干扰  一旦测出就是一个不变量,而磁场h值又是可以从三分量磁传感器直接读得的,因此在这里只有
一旦测出就是一个不变量,而磁场h值又是可以从三分量磁传感器直接读得的,因此在这里只有 `
` ` 是未知量。故将(2)式作如下变形:
` 是未知量。故将(2)式作如下变形:
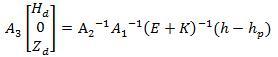 (3)
(3)
很容易看出(3)式右侧各参数都是已知的,不妨设 ,其中向量T的物理意义是舰船不存在纵横摇时、任意航向下地磁场在舰船坐标系上的投影。这样可以将(3)式写成:
,其中向量T的物理意义是舰船不存在纵横摇时、任意航向下地磁场在舰船坐标系上的投影。这样可以将(3)式写成:
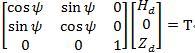
从而分别得到

3.2 硬件资源配置
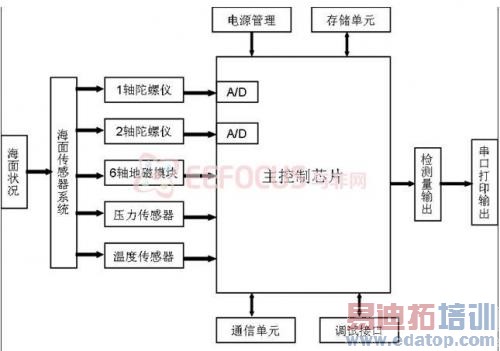
硬件配置图
上一篇:基于电磁感应的液体粘度测量方法研究
下一篇:莱特波特无线终端测试解决方案

